Scan30008
kcie 9 (przełączone wyłączniki bi i c0) układ czeka na pojawienie się sygnału r od przycisku ręcznego, aby powtórzyć cykl pracy. Na podstawie opracowanego cyklogramu (rys. 9.20b) wykreślono pneumatyczny schemat funkcjonalny układu (rys. 9.21). Do realizacji koniunkcji sygnałów: r i bl, rby i c0, b0 i ct, b0 i c0, i cls ct i aŁ, at i ca, a0 i b0 oraz a0 i b1 wykorzystano 9 elementów koniunkcji. Aby uzyskać sumowanie sygnałów rb1cll + b0c1 oraz b0ca + b1c1, sterujących zaworem rozdzielającym PA, wykorzystano dwa elementy alternatywy. W wyniku otrzymano poszukiwany układ.
9.3.5. Metody algorytmiczne (nieanalityczne) projektowania pneumatycznych układów przełączających
Metody algorytmiczne (nieanalityczne) projektowania pneumatycznych układów przełączających, przy pewnej wprawie, można stosować do syntezy nawet bardzo rozbudowanych i skomplikowanych układów, pracujących wg jednego określonego cyklu pracy, a po pewnej modyfikacji jest możliwe ich wykorzystanie do projektowania układów pracujących wg kilku różnych cyklów pracy. Zaletą tych metod w stosunku do metody intuicyjnej jest dość ścisłe (lub ścisłe) określenie algorytmu projektowania, jaki trzeba zastosować, aby uzyskać prawidłowo działający układ, który jednak nie zawsze będzie zawierał minimalną liczbę elementów w układzie i połączeń między nimi. Dopiero metody analityczne gwarantują otrzymanie układów optymalnych. Przeważnie jednak w praktyce inżynierskiej występuje duża liczba prostych układów, których synteza metodami nieanalitycznymi daje zadowalające wyniki z punktu widzenia praktycznego.
Metody algorytmiczne są stosowane najczęściej do projektowania układów sekwencyjnych. Zwykle w tych układach siłowniki lub inne elementy wykonawcze współpracują z dwustanowymi zaworami rozdzielającymi, sterowanymi obustronnie sprężonym powietrzem lub elektrycznie, a kontrola położeń tłoczysk siłowników jest realizowana przez komplet wyłączników drogowych i krańcowych.
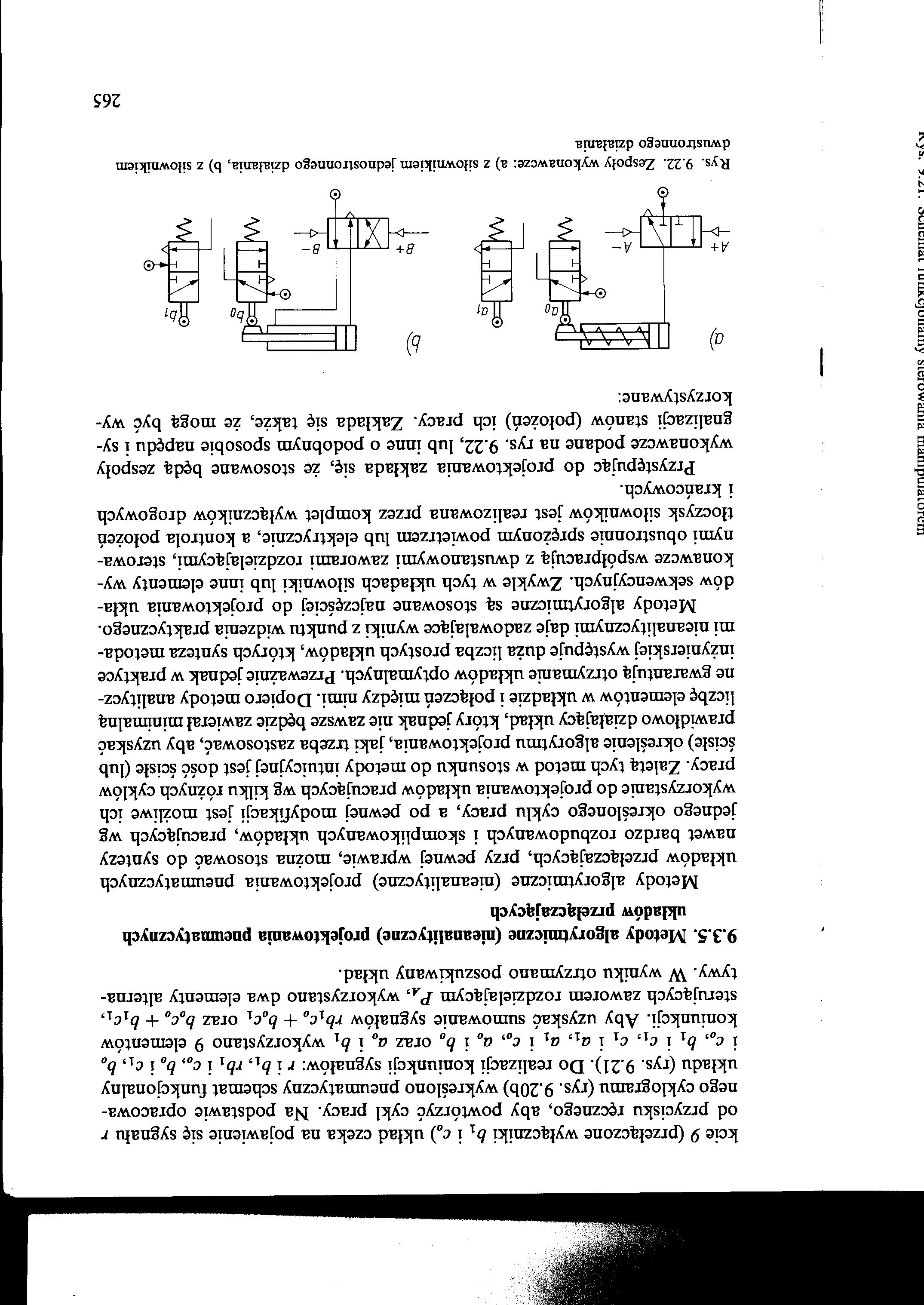
Przystępując do projektowania zakłada się, że stosowane będą zespoły wykonawcze podane na rys. 9.22, lub inne o podobnym sposobie napędu i sygnalizacji stanów (położeń) ich pracy. Zakłada się także, że mogą być wykorzystywane:
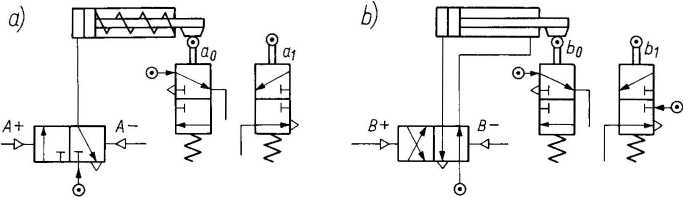
Rys. 9.22. Zespoły wykonawcze: a) z siłownikiem jednostronnego działania, b) z siłownikiem dwustronnego działania
265
Wyszukiwarka
Podobne podstrony:
Image512 emiterowego RE. Po przełączeniu na wyjściu układu pojawia się sygnał 1, przy czym sygnał te
to miejsce, czeka na ciebieZAPISZ SIĘ NA STUDIA
Image512 emiterowego RE. Po przełączeniu na wyjściu układu pojawia się sygnał 1, przy czym sygnał te
Image473 przedstawiono na rys. 4.589a. Jeśli przełącznik P jest w pozycji 7, to układ działa tak, ja
^--UFFF.. JAKI CtĘzia ZAJRZYJMY DO NIEJ. Z06ACZY/Vy,C0 NAS CZEKA W NAJBLIŻSZEJ PRzysztc^ci. UCH
Rys. 5.37 Rys. 5.38 o + * I •l Wyłącznik świateł o- Prosty układ sygnalizacyjny (lys.
293 (33) - 293Praca nieliniowa dynamiczna Rys. 5.46 Proces przełączania tranzystora w układzie WE: a
3.4.4. Pomiar prądu wyzwalającego wyłącznik różnicowoprądowy Połączyć układ pomiarowy wg rys.
Obraz (42) 5Ł*advcki piJdocfu A*v> bi ~c0?7e^D 2Qkrt?ł- *obsręcAU Jwa? ui ftfso
error InternatES Program nie odpowiada. Może być zajęty, czeka na Twoję reakcję lub przestał- dział-
Geologia wyklad 4 Strefowy układ roślinności na brzegu jeziora oligotroficznego i eutroficznego I s
image050 5. Proces PI uruchamia wątek wł. a proces P2 unrchamia wątek w2. Wątek wl czeka na zdarzeni
Image294 realizację operacji dodawania. Układ przedstawiony na rys. 4.335 umożliwia realizację opera
Image318 Funkcje arytmetyczne i logiczne realizowane przez układ 181 przy założeniu, ie sygnałem akt
więcej podobnych podstron