silnik asynchroniczny klatkowy2

Prąd ten dla silników klatkowych wynosi Ir = (4-6)In. Duży prąd rozruchu powoduje z jednej strony intensywne nagrzewanie silnika, z drugiej - znaczne nieraz spadki napięcia w sieci, co niekorzystnie wpływa na pracę pozostałych odbiorników, zasilanych z tej samej sieci. W związku z powyższym rozruch bezpośredni polegający na zasilaniu silnika pełnym napięciem znamionowym jest powszechnie stosowany wyłącznie przy silnikach niewielkiej mocy (do 4,5kW). Silniki większych mocy (do 15kW) uruchamia się przy obniżonym napięciu, przy czym stosuje się wówczas rozruch za pomocą autotransformatora (rys. 10.5) lub przełącznika gwiazda - trójkąt (rys. 10.6).
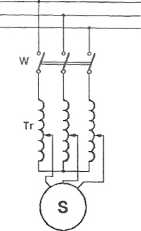
■Rys.10.5. Rozruch silnika asynchronicznego przez obniżenie napięcia sieci za pomocą autotransformatora

Rys.10.6. Rozruch silnika klatkowego za pomocą przełącznika gwiazda -trójkąt
Rozruch za pomocą przełącznika gwiazda - trójkąt jest możliwy w tym przypadku, gdy napięcie sieci jest napięciem znamionowym silnika pracującego w układzie trójkąta. Przy rozruchu pod obciążeniem należy zwracać uwagę na zmniejszenie momentu rozruchowego.
Prędkość obrotowa silnika indukcyjnego może być określona wzorem:
u i 60f h i n = ns |f-s| = — \1-s\
Ze wzoru wynika, że prędkość obrotowa może być regulowana przez zmianę częstotliwości / napięcia zasilającego, zmianę liczby par biegunówp lub zmianę poślizgu s.
Regulacja prędkości przez zmianę częstotliwości wymaga oddzielnego źródła zasilania (przetwornicy) i dlatego może się opłacać przy silnikach wymagających ciągłej regulacji w szerokich granicach.
Zmiana liczby par biegunów p na fazę pozwala na skokową regulację prędkości obrotowej i w praktyce jest realizowana w tzw. silnikach wielobiegowych, o dwóch, trzech, a nawet czterech prędkościach znamionowych.
Wyszukiwarka
Podobne podstrony:
silnik asynchroniczny L1 L2 L3Schemat silnika asynchronicznego klatkowego 1 - silnik, 2 - uzwojenie
silnik asynchroniczny klatkowy3 Zmianę kierunku obrotów silnika uzyskuje się przez zmianę kierunku w
silnik asynchroniczny klatkowy 3. Zasada działania silnika asynchronicznego klatkowego Uzwojenie wir
IMG245 2 Rys. 7.5, Przebiegi podczas rozruchu silnika asynchronicznego klatkowego za pomocą stycznik
maszyny 2 Żad. 1. Dany jest silnik asynchroniczny klatkowy o mocy Pn = 7,5 kW, U» = 380V (A). nN>
1962841#8350076344801S0124848 n Maszyna as) nchrookzna Zadanie 2 (2pkt) Silnik asynchroniczny klatko
54026 przekładnia1 1. Dobór silnika Przyjęto silnik indukcyjny trójfazowy asynchroniczny klatkowy ty
Rozdział 1. Wprowadzenie Rysunek 1.12. Napęd z silnikiem asynchronicznym klatkowym zasilanym poprzez
IMG228 19*2,5. Rozruch Przy bezpośrednia włączeniu silnika asynchronicznego do sieci prąd rozruchowy
Zadanie 9. Silnik ten ma duży prąd rozruchowy i mafy moment rozruchowy oraz możliwość zastosowa
więcej podobnych podstron