sztywność (6)
134
i
RUNI
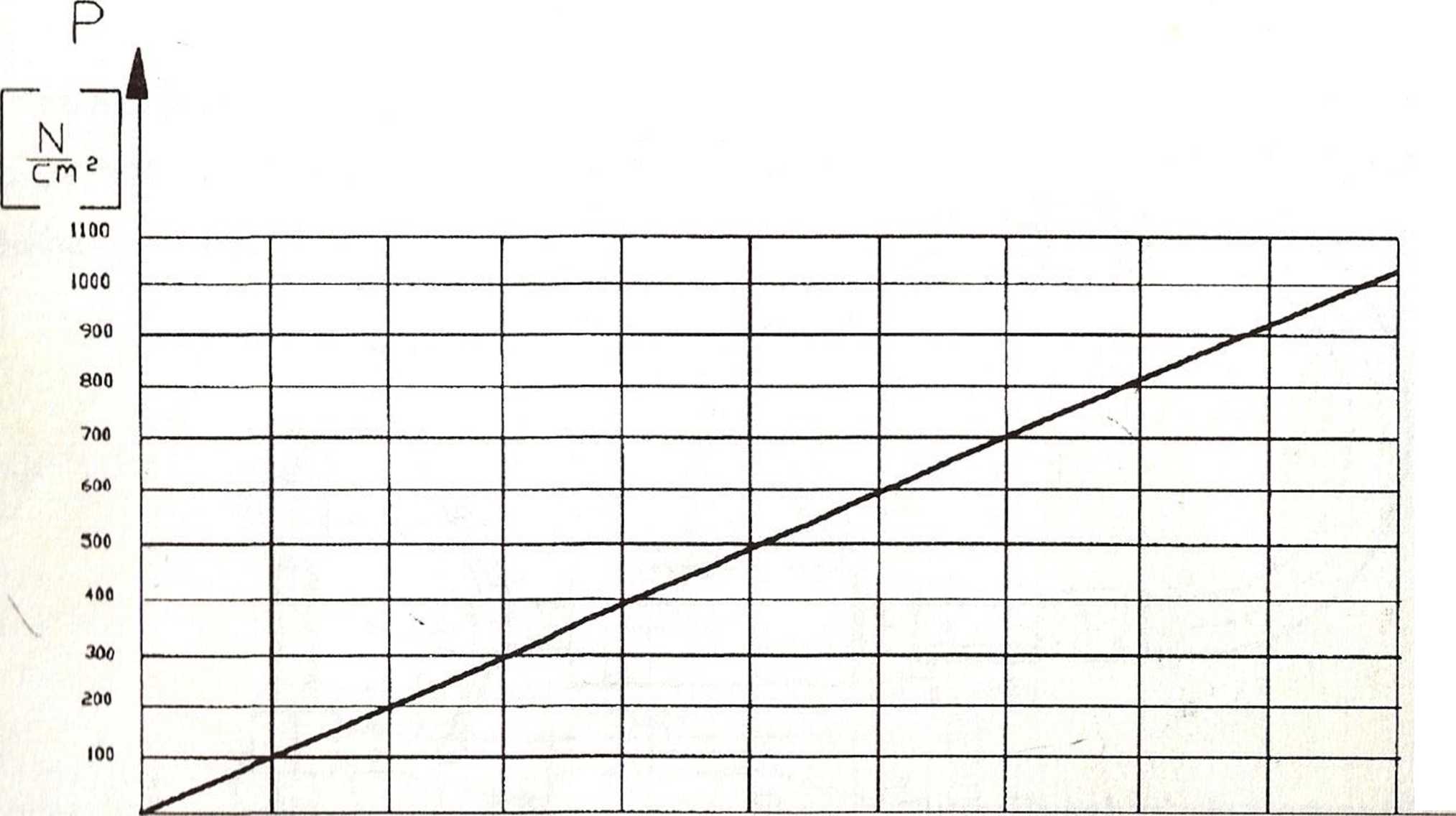
2000
4000
6000
8000
IOOOO
12000
14000
16000
19000
20000
Rys.3.24. Wykres wzorcowania dynamometru hydraulicznego
Uchwyty czujników powinny umożliwiać pewne mocowanie do Im/y pomiarowej mu
dokładne ustawienie czujnika w punkcie pomiarowym ż.dn.i my .stosować uchwyty d
(
czujników wykonane /.godnie z ZN-67/Ml>C'-04-2S0Hiś
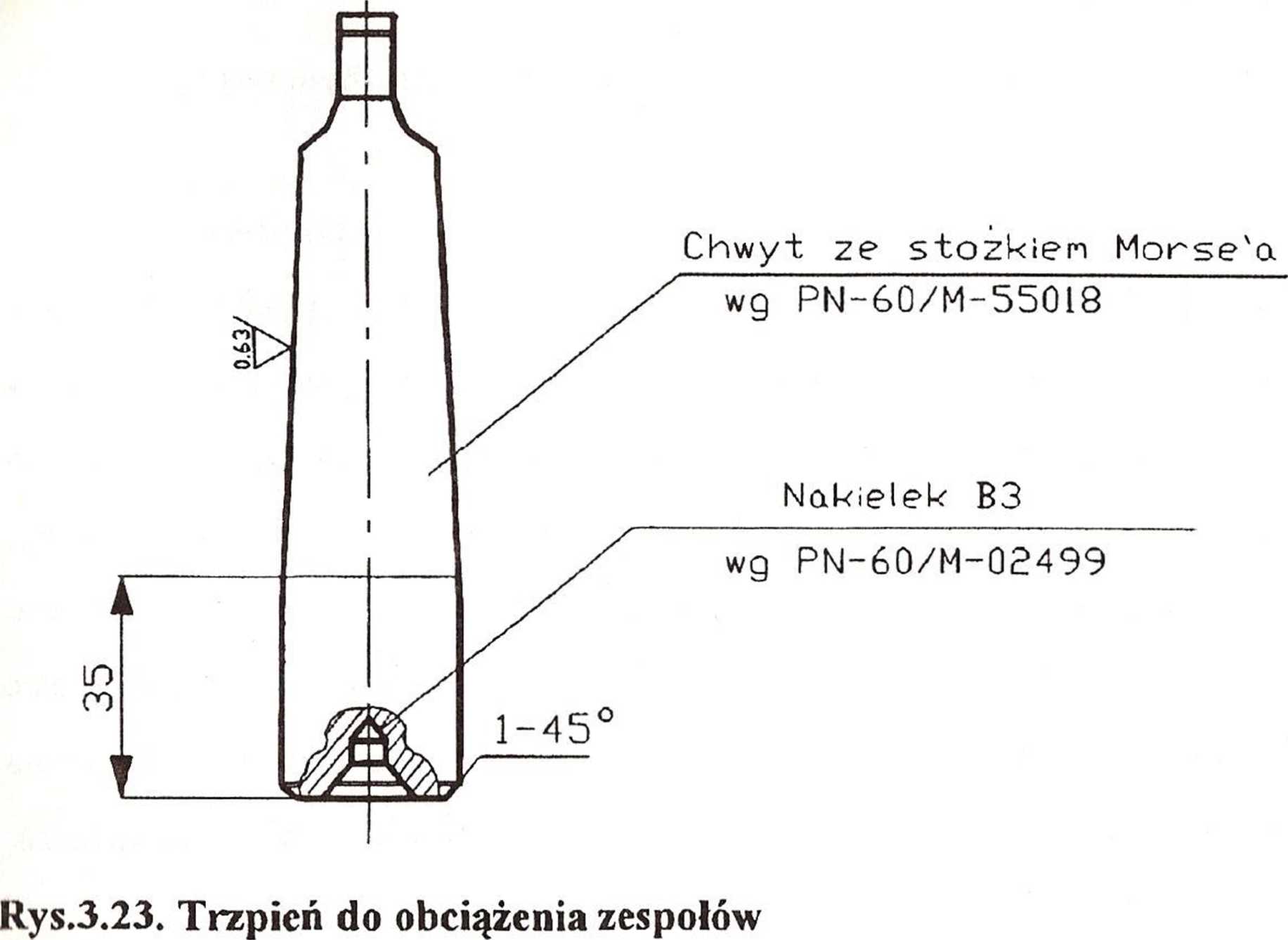
Odkształcenia uchwytów pod działaniem nacisków mierniczych nie mogą powodować Mniów pomiarów większych niż 5%. Obciążenie zespołów powinno być dokonywane poprzez
|[łtM |alny trzpień mocowany w gnieździe wrzeciona. Wymiary części roboczej trzpienia podano
#
Hh tyś. 3.23. Część chwytowa powinna zapewnić bezpośrednie osadzenie trzpienia w gnieździe
i /tsoiona. Niedopuszczalne jest stosowanie tulei redukcyjnych. .----------------------------------~
i Zestaw oprzyrządowania (rys. 3.21) do pomiarów sztywności statycznej wiertarek Milłubowych składa się z: u Spienia pośredniczącego 3, i podstawy z zespołem mocującym czujnik 5, podstawy do mocowania czujnika 7, ilynamometru hydraulicznego 8,
« podstawy do mocowania dynamometru hydraulicznego 9.
W gnieździe stożkowym tulei wrzeciona 2 mocuje się trzpień pośredniczący 3, a na jłlnwndnicach wrzeciennika 4 podstawę 5 z zespołem mocującym czujnik. Na stole 6 wiertarki Mmm njc się podstawę 9, służącą do mocowania dynamometru hydraulicznego 8.
u.
pomiaru
I )ynamometr hydrauliczny współpracuje z podstawą ustalającą wymagany kierunek działania Uh l*i/.esuwając odpowiednio stół w kierunku wzdłużnym i poprzecznym doprowadza się do thhi popychacza dynamometru hydraulicznego z gniazdem trzpienia pośredniczącego. Na stole Mi". iip‘ się także podstawę 7 do mocowania czujnika. Trzpień pośredniczący 3, dynamoinetr th'‘uliczny 8 oraz podstawa dynamometru hydraulicznego 9 są wykonane w trzech = !■ U ościach do pomiarów sztywności statycznej wiertarek kadłubowych o różnych średnicach ■ u ii cni
hP,4.
Każdorazowo przed pomiarami należy.
Wi/ri icnnik i stół ustawić na wysokości 2/3 maksymalnego przesuwu od dolnego położenia,
*
•hIm|v wi/eeiona wysunąć z korpusu wrzeciennika na odległość równą średnicy
iHwnętrzncj tulei,
»"!> iv wrzeciona zablokować przed przesuwem przez sprzęgnięcie jej z kołami
ffhitlymi mechanizmu posuwowego w sposób odpowiadający uzyskaniu najniższej prędkości
posuwowej,
IM o < łono zablokować przed obrotem przez sprzęgnięcie go z kołami zębatymi
mI Imlti napędowego w sposób odpowiadający uzyskaniu najni/szej prędkości obrotowej,
Wyszukiwarka
Podobne podstrony:
O 2000 4000 6000 8000 Wykres
69 (126) cm 2000 4000 6000 6000 1000
CCF20080708�036 d£ 2j-lj_ .1 1-1.1.... I , ..IJ-ilt-lŁ-500
swiat jednostki tektoniczne 2000 0 2000 4000 km na obszarze
• maksymalna prędkość obrotowa z zakresu 4000 - 6000 obr/min, jak w
Zdjęcie0119 (11) Paranetnr wentyiseu gatunek f oddediy/mtii VI ml Vmtn ml/tnin koń 8-16 4000-6000
STREFY KLIMATYCZNE NA ŚMIECIE iumtA 2000 4000 km ^HJii
Zalecana dieta Dzienne zapotrzebowanie na energię: 2000-4000 kcal (zależnie o osoby) Węglowodany: 50
audiogram ubytku 125 250 500 1000 20
również pierwsza drukowana gazeta “Wledomosti” [BeflOMocrn] (1702), wychodząca w nakładzie 2000 - 40
audiogram ubytku 125 250 500 1000 20
P3090252 10000Iteracje Collatza startujące od 27 8000 6000 4000 2000 4 If i
przyklad roznicz1 8000 6000 4000 2000 + 4 + + 4+-H 1 1 1 1 1 I- + 4 . 1 1 1 1 + -ł, 1 1
P3020278 10000Iteracje Collatza startujące od 27 8000 6000 4000 m 2000 0 20
14000 12000 10000 8000 6000 4000 2000 0
więcej podobnych podstron