Zdjęcie0087 2
Grupa f
\ Sva ceym potęga zasada superpozycji i jaki warunek mmi spełniać układ regulacji, aby DMiaajjąn nim słosować
2 K';.w okład* sa astaeyczne (może być kilka odpowiedzi pcprawttych): ąjnkbdgio&tikę
b) uUadL w którym uchyb uetakmy dą£y do nieskończoności, jeZeli sygnał wejściowy »PH
c) układ. w któom uchyb ustalony jest wartością stałą, jcZeli sygnał wejściowy w(t)* l
d> układ. lamy odtwarza w stanie ustalonym skokowy sygnał sterujący z niezerowym błędem
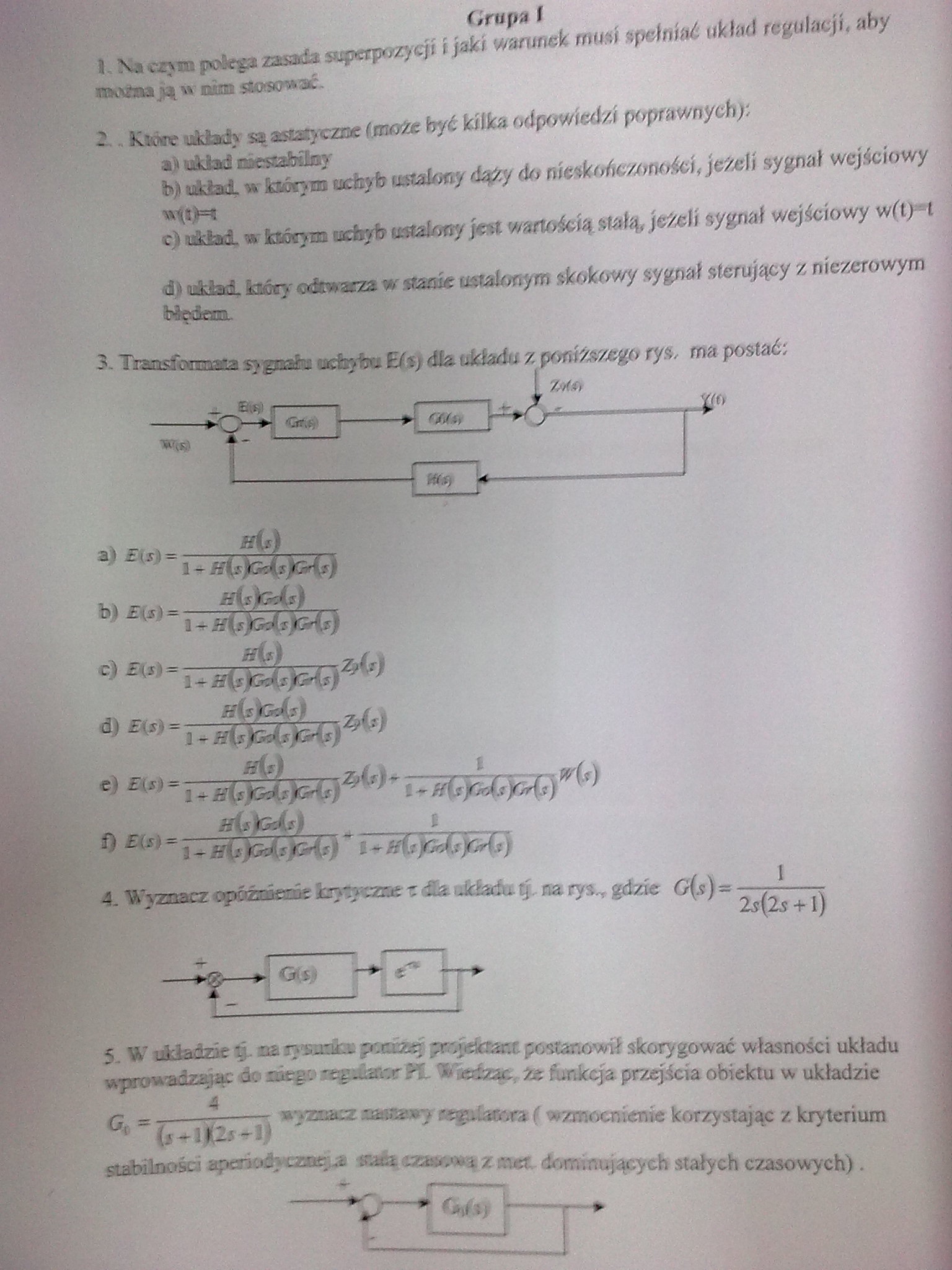
Traaasfcranaea sygear. -jcbybti E/sy dla układu z poniższego rys, ma postać:
. [***
►!'. Cafo%ł «-—»j <jfit.it |* 'T
.** K-
bl F(t>-
d)
/t(«fcUfjcĄr) r t -
ft mi , »
v i*oU)sĄf}cĄf)
2^2* + 1)
4. Wyznacz opóĆBŚnnńe Łr?rycz»t t £a układu tj, ca rys,, gdzie &'(.;)=
|
► Of.£ 1 |
\Ą*~ fp | |
|
- |
5. W układzie g. aa r- saakc preasę projektant postanowił skorygować własności układu wprowadzając as sacg'. .reguaBar FL WicśzsĘp, że funkcja, przejścia obiektu w układzie
wyznacz suMMy regniacora ( wzmocnienie korzystając z. kryterium
(«+łj!2r+l)
stabilności aperiodwcaBs^a sraci czarna* i z mer, dominujących' stałych czasowych).
Wyszukiwarka
Podobne podstrony:
Rotation of P1010713 / Jaki waruneĆ powinny spełniać grubości elementów aby spawanie można było wykb
Rotation of P1010713 / Jaki warunek powinny spełniać grubości elementów aby spawanie można było wyko
Karta2 jpeg Jaki warunek powinny spciniać grubości ełezjenfow aby spawanie ioo±aa było wykonać bes..
500px PS M15 Slajd4 4 ■ % 6-STU0n rrowwnuczneW. 15. Ćwiczenia 3 i.5. Jaki warunek musi spełniać wspó
Zdjęcie 0178 Gr. A 1. Wykazać, że transpozycja superpozycji relacji rozmytych jest
zestaw zada? nr 3 A` GRUPA A1ZESTAW ZADAŃ NR 3 1- Diagram przedstawia jaki obszar działki zajmują kw
skanuj0002(8) A2 - Pomiary w obwodach prądu stałego - zasada superpozycji Oblicz prąd h stosując zas
fizyka 6 Natężenie pola. Pola elektryczne układów ładunków - zasada superpozycji. Linie sil pola . S
Zszywacz pneumatyczny -zasada działania, jaki kupić?
70114 IMG273 (2) Zasada superpozycji Odpowiedź okładu lodowego na sumę wymuszeń równa się sumie odpo
więcej podobnych podstron