16 (43)
u zasada dyno rr^ kl dis ruchu obrotowogo ciała sztywnego UC»*»v.n\e ruc*-analogiczne śouttu postępowego)
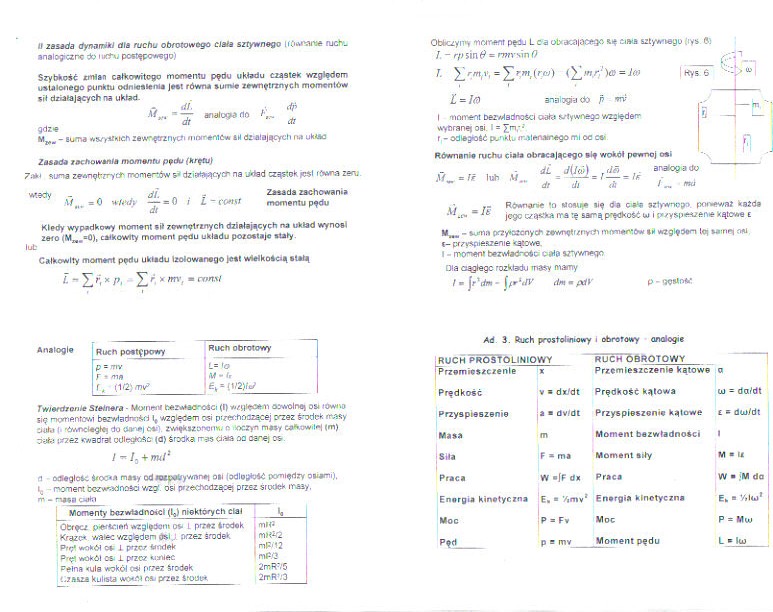
ObkczyiT»> 'nemem pędu L ca otxdcd|ac*gó ** nmi sztywieau (iys
Szybkość zmian całkowitego momentu pądu układu czaste* wzglądom ustalonego punktu odniesienia Jest równa sumie zewnętrznych momentów sił drgających na układ

dl. \ dr
— analog* no *^
gdz*
U^m - fuma *s/y*nueh ze-A-ąrznytn momentów atf drgających na uk<ec
/ “ rp sin 0 = rwrsin 0
I. ^ rm(\\ = ^rwf (w) (V .*/•/ )d> = ](o
* i
i = 1(0 analna <to p mv
I -nnirent bezwładności rato sztywnego y/zzęde^* wybranej obi : = Xn'* r - odwgoić punktu rr->tnnairego mi oc ce
|
Kys o |
,u> | ||
|
— m | |||
|
El | |||
Zasada zachowania momentu pędu (krętu)
7;** *nr-*a zoAnąbzrycr* momertów sł dzi^łSflcycr na jdad cząstek ^$i zeru
w:^tv - dl - Zasada zachowania
V/#l. = 0 Wf&J} — = 0 i L • ront/ momentu pądu
Kiedy wypadkowy moment s»ł zewnętrznych działających na układ wynosi zero (Mm.=0), caikowtty moment pędu układu pozostaje sury
lub
Całkowity moment pędu układu Izolowanego jest wielkością etałą
L - V r, x /;, £ r ;■ mv. ■ consł
Równeme mchu ciała obracającego elf wokół pewno) osi
dl J(lw) _ f r/« _ v anak>g*du di di dl I ~
Sł^^fr lub ,W.

mu
Równani *o ftfosuye uę de ca*a sztywnego pcw>*v/a* *aZde jege cząstka rra :ę samąpyędkosć w i c*/ysp*sien* kątowe c
M,#„ - k^na przy^szcnych zewnętrznych mrynków u wzglądem lot kann nai
i— prz^iftsz^nie cąlowe I - moment bezw4*d-ots cała szrywnego Ola aągtegc rozkładu ma$y mamy / ■ Jr'iós • fsr*t/y dm - /tfl' p - *jcslnW
|
Analogie |
Ruch postępowy |
Ruch obrotowy |
|
p = rnv |
L= fo | |
|
f • mą |
.\f - łt | |
|
r, (i/2> /r^ |
= {1i’2)iV |
Krazc* walec względem feu r^zez środek mi#2 Prę* wokół OS- 1 prZCZ kr Odek roR/12
P'& wokół CS-1 przez urnoc mP/2
"ełna <ule wokół osi przez grodek 2mR:.’5
i.ihSLS kulista wo«ół cjl przez irout* 2rrR‘:3
Twierdzono St&łnera Momm# btZttśaorości (0 w/gląOftm oowołnoj o* 'Ów** się momentowi ber/ziac^^i i< względem osi przechodzącej :«*Z9Z środek masy Ciulu! 'ówncłeglej do 0* *1 Oś rwąfcsronen*. o ocr>n masy ce*.owt*| (m) cwte <v»Bdrat odlegtaftc <d> środka ras ciao oa oarej as-
I ~ /3 + m</:
rt oaegłcśc i*oc«* masy od jozuos/ywnnet on odlogkHĆ pomiędzy osiami). y: moment ccz*r.**no§ci wzo* o* pr/echcdzą^ orzez środek irasy.
m - maspcMiłn _ _____
Momenty bczwtadnoicł (lą) niektórych ciał ją
Otrąci per^mrt wzglądom ov i przez iredek mH*
Ad 3. Ruch prostoliniowy • obrotowy analogie
|
RUCH PROSTOLINIOWY |
RUCH OBROTOWY | ||
|
Przemieszczenie |
X |
Przemieszczenie kątowe |
0 |
|
Prędkość |
v ■ dx/dt |
Prędkość Mlowa |
ui = da/dt |
|
Przyspieszenie |
a ■ dv/dt |
Przyspieszenie kątowe |
t « dui/dt |
|
Masa |
m |
Moment bezwładności |
l |
|
S»ła |
F * ma |
Moment siły |
M • 11 |
|
Praca |
W «JF dx |
Praca |
W ■ M do |
|
Energia kinetyczna |
E. ■ */imvł |
Energia kinetyczna |
Ek » %lu)' |
|
Moc |
P * Fv |
Moc |
P = Mw |
|
p*<i |
p a mv |
Moment pędu |
L » lui |
Wyszukiwarka
Podobne podstrony:
Slajd19 Równanie ruchu obrotowego ciała sztywnego: cp = cp( t)= rcp(t) 19
SL272460 I zasada dynamiki dla ruchu obrotowego bryły sztywnej Jeżeli wypadkowy moment ni działający
SL272460 I zasada dynamiki dla ruchu obrotowego bryły sztywnej Jeżeli wypadkowy moment ni działający
43200 SL272466 1 zasada dynamiki dla ruchu obrotowego bryły sztywnej Jeżeli wypadkowy moment sil dzi
Slajd12 Ruch obrotowy bryły sztywnej Druga zasada dynamiki Newtona dla ruchu obrotowego bryły sztywn
skanuj0007 (470) Rozwiązanie Do wyznaczenia ruchu obrotowego ciała wokół osi ustalonej y korzystamy
SL272477 E ner sin kinetyczna ruchu obrotowego bryły sztywnej
P1010929 (5) RUCH OBROTOWY CIAŁA SZTYWNEGO Radl ciała sztywnego określony jest przez ruch trzech pun
więcej podobnych podstron