6 (232)
jącego cewkę d0/dt wywołuje w cewce siłę elektromotoryczną o małej wartości, którą trudno zidentyfikować na tle zakłóceń elektromagnetycznych.
2.4. Tachometry impulsowe
Tachometry impulsowe składają się z impulsatora, wytwarzającego impulsy o częstotliwości proporcjonalnej do mierzonej prędkości obrotowej, oraz układu elektronicznego, przekształcającego ciąg impulsów na sygnał analogowy lub dyskretny odczytywany na mierniku wskazówkowym lub cyfrowym. Wytwarzanie impulsów może odbywać się na drodze mechanicznej (zamykanie i otwieranie zestyku), fotoelektrycznej (zmiana natężenia światła), magnetycznej (zmiana reluktancji powodująca zmianę strumienia magnetycznego).
a) Tachometr stykowy
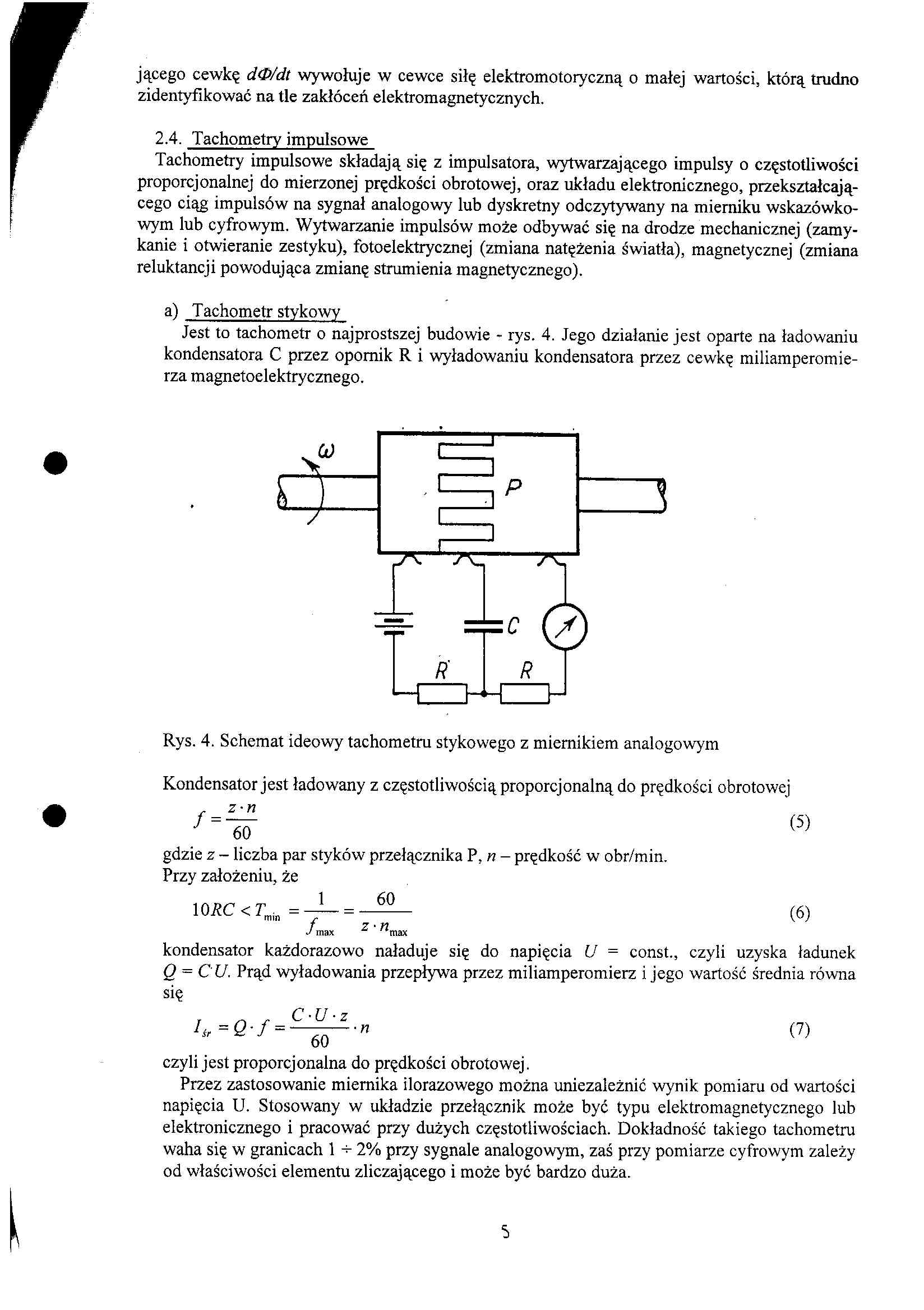
Jest to tachometr o najprostszej budowie - rys. 4. Jego działanie jest oparte na ładowaniu kondensatora C przez opornik R i wyładowaniu kondensatora przez cewkę miłiamperomie-rza magnetoelektrycznego.
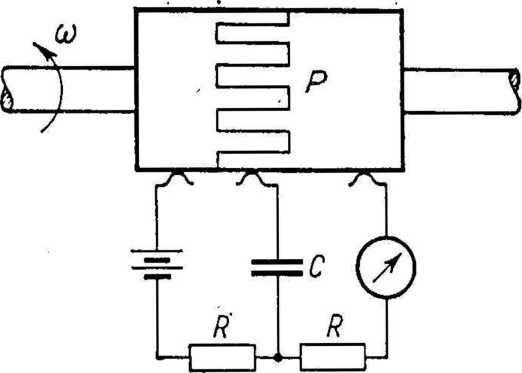
Rys. 4. Schemat ideowy tachometru stykowego z miernikiem analogowym
Kondensator jest ładowany z częstotliwością proporcjonalną do prędkości obrotowej
/ =
gdzie z - liczba par styków przełącznika P, n - prędkość w obr/min.
Przy założeniu, że
ioi?c < rmi„ = —(6)
f z' n
J max max
kondensator każdorazowo naładuje się do napięcia U = const., czyli uzyska ładunek Q — CU. Prąd wyładowania przepływa przez miliamperomierz i jego wartość średnia równa się
■śr
= Q-f =
C-U-z
--n
60
czyli jest proporcjonalna do prędkości obrotowej.
Przez zastosowanie miernika ilorazowego można uniezależnić wynik pomiaru od wartości napięcia U. Stosowany w układzie przełącznik może być typu elektromagnetycznego lub elektronicznego i pracować przy dużych częstotliwościach. Dokładność takiego tachometru waha się w granicach 1 + 2% przy sygnale analogowym, zaś przy pomiarze cyfrowym zależy od właściwości elementu zliczającego i może być bardzo duża.
Wyszukiwarka
Podobne podstrony:
Powstającą w cewce siłę elektromotoryczną indukcji własnej można zapisać wzorem: £
Skrypt PKM 1 00142 284 wywołując osiową siłę oddziaływania sprężyny na tarczę sprzęgła Fj —fc = 302^
Skrypt PKM 1 00142 284 wywołując osiową siłę oddziaływania sprężyny na tarczę sprzęgła Fj —fc = 302^
s 75 75 Siłę elektromotoryczną (SEM) ogniwa można obliczyć za pomocą następującej zależności: SEM =
skanowanie0028(1) d2q / dt2 + R / L (dq dt) + 1/ CL = O - ukl. w owodzie elektrycznym 61. Zależność
egz fiz2 Nupiw wriSr m silę elektromotoryczną ogniwa Zn
CCF20111004�020 j^yOoliczyć siłę elektromotoryczną S5M i rezystancję wewnętrzną źródła wiedząc, is
2 (501) Dg D0 Rys.l. Położenie mimośrodowe centrów elektrycznych względem centrów geometrycznych w
532 533 (2) Czysty przekrój materiału magnetycznego rdzenia w cewce transformatora qt, którego warto
0000016 (18) wzorem 4.44. w którym fi oznacza siłę elektromotoryczną ogniwa równą potencjałowi redox
Z godnie z wyrażeniami na siłę, moment obrotowy oraz na indukowaną siłę elektromotoryczną efekt zale
Oznaczmy siłę elektromotoryczną symbolem £ Spełnione są zależności £=£/,+/,/?„
więcej podobnych podstron