TMP32
144
5 Języ ki specyfikacji dla układów programowalnych
sygnałów grupowych Zatem modyfikacja specyfikacji z przykładu 5.18 umożliwiająca definiowane przez uż>tkownika zakodowanie stanów jest następująca:
VARIABLE
q : MACHINĘ OF BITS (q(1..3))
NITH STATES (stanl - B"000", stan2 - B"00I", stan3 - B"010", stan4 - B"011", stanS - B"100");
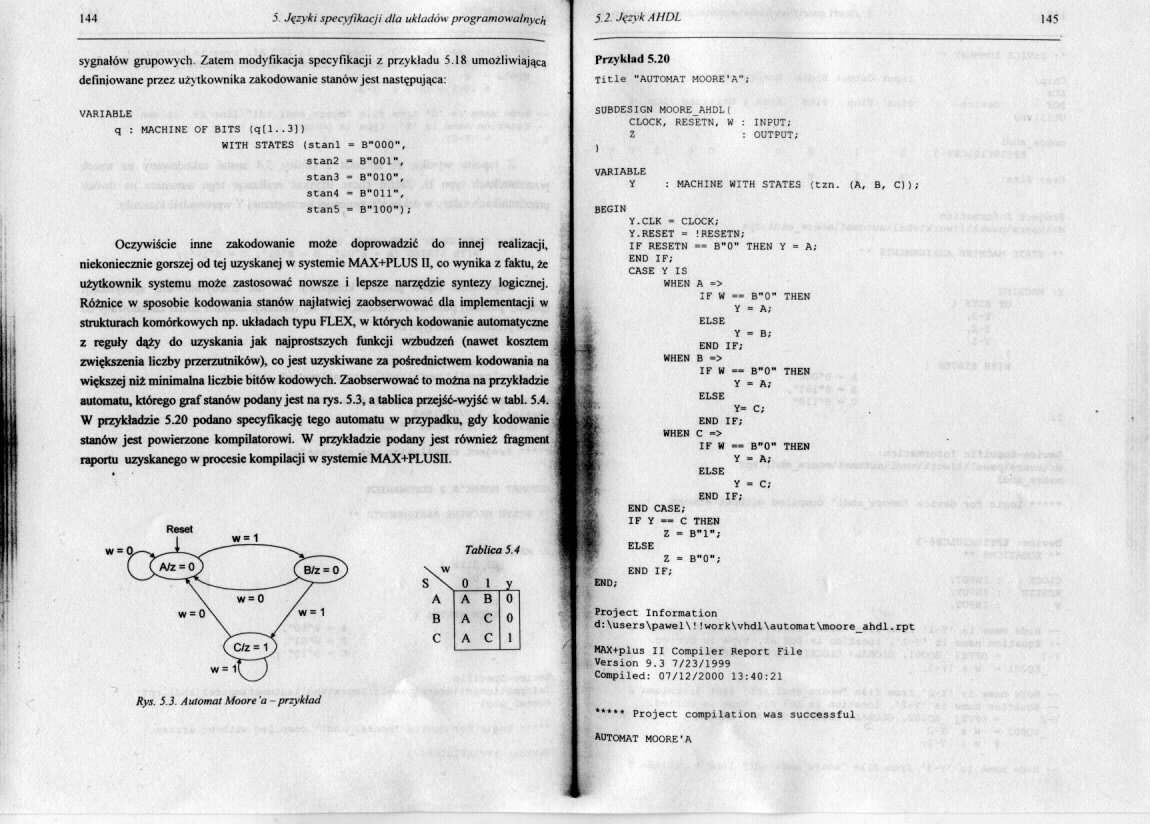
Oczywiście inne zakodowanie może doprowadzić do innej realizacji, niekoniecznie gorszej od tej uzyskanej w systemie MAX+PLUS II, co wynika z faktu, że użytkownik systemu może zastosować nowsze i lepsze narzędzie syntezy logicznej. Różnice w sposobie kodowania stanów najłatwiej zaobserwować dla implementacji w strukturach komórkowych np. układach typu FLEX, w których kodowanie automatyczne z reguły dąży do uzyskania jak najprostszych funkcji wzbudzeń (nawet kosztem zwiększenia liczby przerzutników). co jest uzyskiwane za pośrednictwem kodowania na większej niż minimalna liczbie bitów kodowych. Zaobserwować to można na przykładzie automatu, którego graf stanów podany jest na rys. S.3, a tablica przejść-wyjść w tabl. 5.4. W przykładzie 5.20 podano specyfikację tego automatu w przypadku, gdy kodowanie stanów jest powierzone kompilatorowi. W przykładzie podany jest również fragment raportu uzyskanego w procesie kompilacji w systemie MAX+PLUSII.
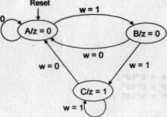
Rys. 5.3. Automat Moort a przykład
Tablica 5 .4
s\o_L_y
A A B I 0
BACO C A C 1
5.2 Język AHDL
145
przykład 5.20
Title "AUTOMAT MOORE'A";
SUBDESIGN MOORE_AHDLI
CLOCK, RESETN, W : INPUT;
2 : OUTPUT;
VARIABLE
Y : MACHINĘ WITH STATES (tzn. (A, B, C));
Y.CLK - CLOCK;
Y.RESET = !RESETN;
IF RESETN — B"0" THEN Y - A; END IF;
CASE Y IS
WHEN A ->
IF H » B"0" THEN
ELSE
END IF;
NHEN B »
IF W -- B"0" THEN
ELSE
Y- C;
END IF;
WHEN C ->
IF M — B"0" THEN
Y - A;
ELSE
END IF;
END CASE;
IF Y — C THEN Z - B"1";
ELSE
Z - B"0";
END IF;
Project Information
d:\users\pawel\!!work\vhdI\automat\moore_ahdl.rpt
MAX+plus II Compiler Report File Version 9.3 7/23/1999 Compiled: 07/12/2000 13:40:21
'**" Project compilation was successful
AUTOMAT MOORE'A
Wyszukiwarka
Podobne podstrony:
TMP26 132 5 Języki specyfikacji dla układów programowalnych c) (a.b.c)•,d.e,i) ozn
TMP23 126 5 Języki specyfikacji dla układów programowalnych - PARAMETERS (opcjonal
TMP26 132 5. Języki specyfikacji dla układów programowalnych C) (a,b,c)•id.e, f) oznacza (ald.ble.cl
TMP28 1365 Języki specyfikacji dla układów programowalnych •• EOUATIONS •• DO
TMP30 140 S. Języki specyfikacji dla układów programowalnych 5.2. Język AHDL 141 Odpowicdni plik rap
TMP35 150 5 Języki specyfikacji dla układów programowalnych qI].clk - zegar; wyjII - qll; y - (
TMP25 i 130 5 Języki specyfikacji dla układów programowalnych 5 2 Język AHDl.131 Liczby i stale Zgod
TMP29 138 5 Języki specyfikacji dla układów programow alnych W niektórych przypadkach instrukcje IF
TMP31 142 5 Języki specyfikacji dla układów programowalnych WITH STATES ( stanl - B"000",
TMP36 152y Ję:yki specyfikacji dla układów programow alnych Device-Specific
TMP34 148 f J‘: ki 5fH cyfikacji dla układów programowalnych •• F.QUATIONS ** CLOCK
TMP34 148 f Języki specyfikacji dla ukladtm programowalnych •• EOUATIONS •• CLOCK
TMP22 5 Języki s/wnfikacji dla układów programowalnych B3 JS - [83,B2,B1.B0
TMP27 134 5. Języki specyfikacji tihi układów programowalnych Węzły, które są deklarowane w sekcji z
Przedstawiony na rys. 17 algorytm jest przeznaczony dla układów napędowych, ale po drobnych modyfika
więcej podobnych podstron