001
|
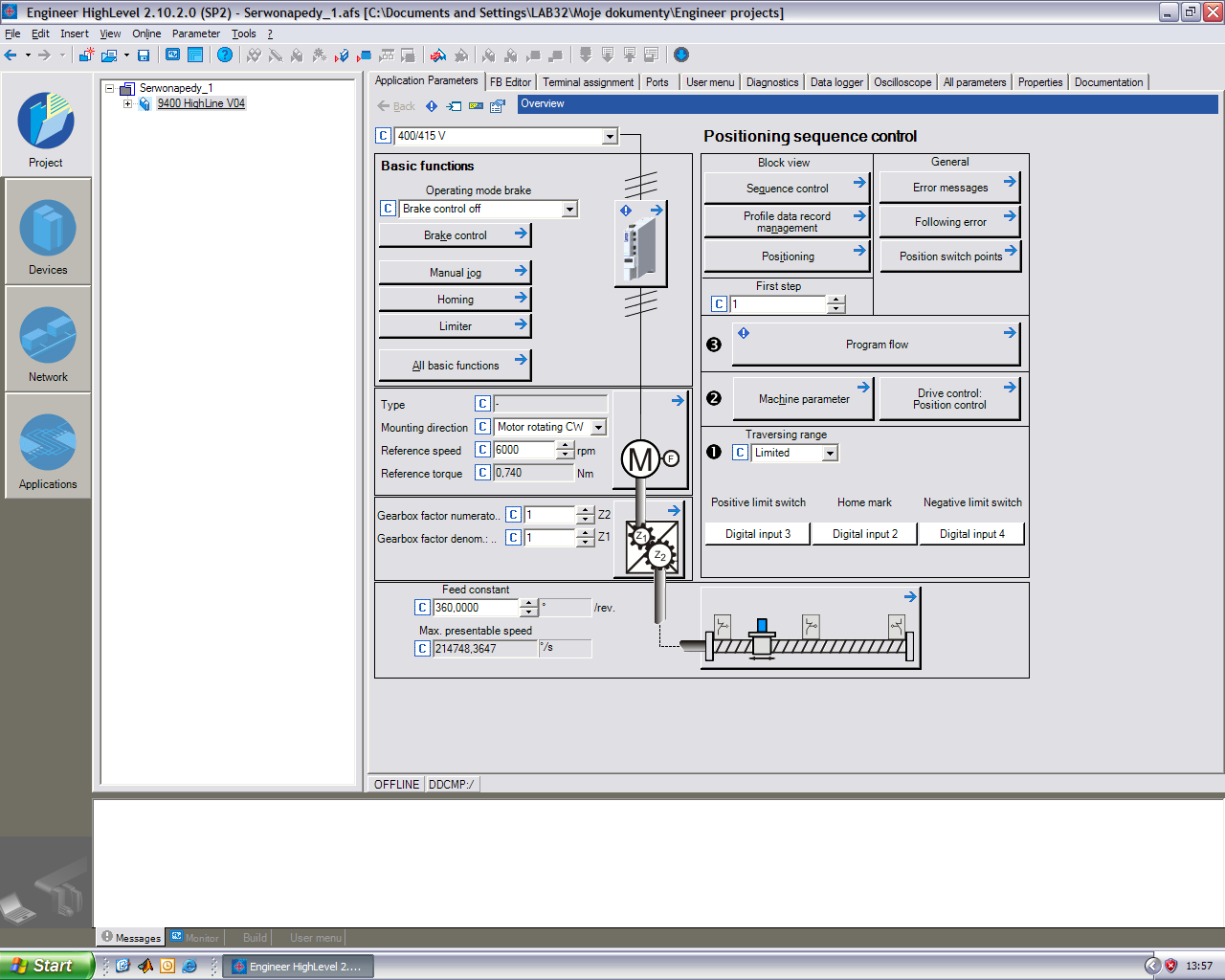
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:\Documents and Settings\LAB32\Moje dokumenty\Engineer projects] |
~UsM |
|
File Edit Insert View On[ine Parameter Tools ? |
itf Cg • B 0 “ 9 .V ,V

Project
B [3 SerA'onaped>'_1
a § 9400 HiohUne V04
MSI*
Application Parameters | FB Editor ] Terminal assignment | Ports | User menu | Diagnostics | Data logger | Oscilloscope | Ali parameters | Properties | Documentation
Back O ->□ E2a gf
|C]| 400/415 V
Overview



Applications
Engineer HighLevel 2....
[Ć]| Brake control off
Brake control
|
Manuał iog | |
|
Homing | |
|
Limiter |
Ali basie functions
Type HF
Mounting direction [~C~]| Motor rotating CW ▼ Reference s peed [c] [6000 rpm
Reference torq ue [c] |0.740
Gearbox factor numerato.. [clR Gearbox factor denom.:.. [c] [i
Basic functions
Operating modę brake
Feed constant
[C]|360.0000
Max. presentable speed [C] [2147483647
Positioning seguence control
Traversing rangę O Limited ▼
Positive limit switch Home mark Negative limit switch Digital input 3 I Digital input 2 I Digital input 4
Błock view
General
|
Seguence control |
Error messages | ||
|
Profile data record management |
Fol łowi ng error | ||
|
Positioning |
Position switch points ^ | ||
First step
Program flow
Machinę parameter
Drive control: Position control
|
A |
-< | |||
|
Tl |
77LJZZ777ZZ7777777 | |||
OFFLINE DDCMP:/
13:57
Wyszukiwarka
Podobne podstrony:
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
więcej podobnych podstron