14
|
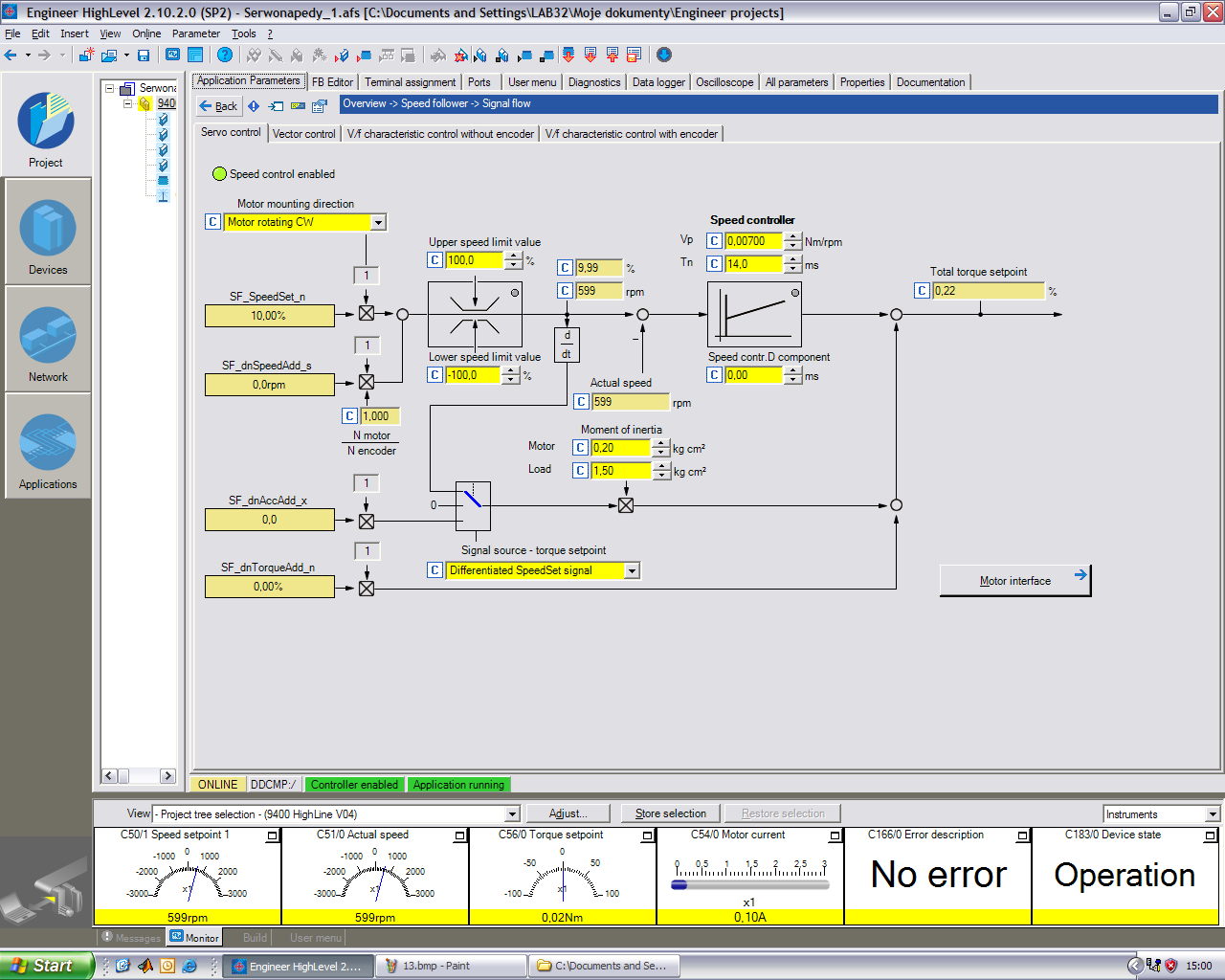
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:\Documents and Settings\LAB32\Moje dokumenty\Engineer projects] |
~usm |
|
File Edit Insert View On[ine Parameter Tools ? |
«- H # Cg - 0 0B •
- [5] Serwom
H % 940 *

Project
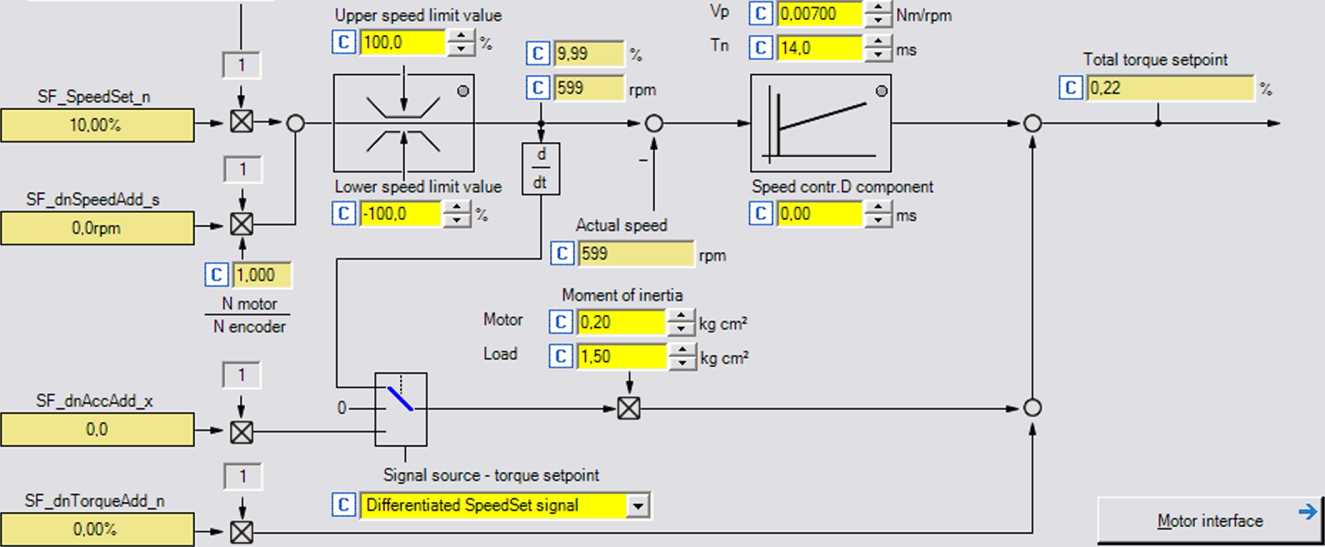
Overview -> Speed follower -> Signal flow
.^R!i?^!?™.ff™®f.?^.j] FB Editor | Terminal assignment | Ports | User menu | Diagnostics | Data logger | Oscilloscope | Ali parameters | Properties | Documentation •Ś- Back <►
Servo control | Vector control | MA characteristic control without encoder | MA characteristic control with encoder O Speed control enabled

Devices

NetWork

Applications
Motor mounting direction nir Motor rotating CW
Speed controller
ONLINE DDCMP:/ Controller enabled Application running
|
View|- Projecttree selection - (9400 HighUneV04) ▼ Adjust... Storęselection Restoreselection j |lnstmments ▼! | |||||
|
C50/1 Speed setpoint 1 n| -1000 0 1000 -2(X»J^<l,^i2aX) ■zyyj-f yj |
C51/0Actual speed ^nj -1000 0 1000 -2(X»J^<l,^i2ax) |
C5S'0Torque setpoint _nj 0 -50 50 V"......"v % -100 -i x1 \-100 |
C54/0 Motor current ^nj 0 05 1 15 2 25 3 11111111111111111111111111111 ilu 1111 x1 |
C166/0 Error descri ption _nj No error |
C183/0 Device State n Operation |
|
599rpm |
599rpm |
0.02Nm |
0.10A | ||
Engineer HighLevel 2.
13.bmp - Paint
& C: pocuments and Se...
:00
Wyszukiwarka
Podobne podstrony:
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
więcej podobnych podstron