105
Rozdział 4. ♦ Systemy cyfrowej transmisji bezprzewodowej 105
Topologia sieci
W systemie BlueTooth możliwe jest utworzenie łącza dwu- lub wielopunktowego. Co najmniej dwa urządzenia pracujące w tym samym kanale tworzą podsieć (ang. pi-conet). Jedno urządzenie w takiej podsieci pełni funkcję jednostki nadrzędnej (ang. master), pozostałe są urządzeniami podrzędnymi (ang. slave). Kilka podsieci działających na wspólnym obszarze tworzy sieć rozproszoną (ang. scatternet). W takiej sieci jednostki podrzędne mogą zmieniać podsieci, natomiast jednostka nadrzędna w jednej podsieci może być jednostką nadrzędną w innej. Poszczególne podsieci nie są ze sobą zsynchronizowane i pracują na różnych kanałach. Topologię sieci w systemie BlueTooth ilustruje rysunek 4.32.
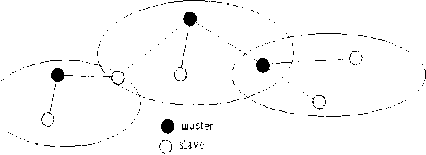
Rys. 4.32.
Topologia sieci w systemie BlueTooth
Architektura systemu BlueTooth
System BlueTooth ma budowę warstwową, w której można wyróżnić:
♦ specyfikację łącza radiowego (ang. Radio Specification),
♦ sterownik łącza (ang. Baseband Specification) i protokoły warstwy liniowej LMP i L2CAP,
♦ protokoły wyższych warstw.
Architekturę systemu ilustruje rysunek 4.33.
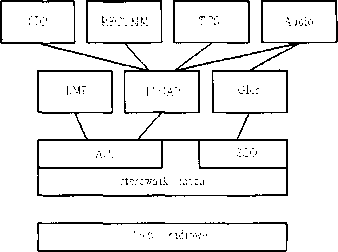
Rys. 4.33.
Architektura systemu BlueTooth
Wyszukiwarka
Podobne podstrony:
Rozdział 5. ♦ Sprzęt do transmisji bezprzewodowej 119Przykłady konfiguracji sieci bezprzewodowych Ze
Rozdział 5. ♦ Sprzęt do transmisji bezprzewodowej 113 zaś dane te nie są nigdzie zapamiętywane. Zakr
Rozdział 5. ♦ Sprzęt do transmisji bezprzewodowej 115 ♦ zasięg wynosi do
Rozdział 5. ♦ Sprzęt do transmisji bezprzewodowej 117 zapamiętywane, dzięki czemu most może określić
Rozdział 5. ♦ Sprzęt do transmisji bezprzewodowej 121Rys. 5.5. Przykład bezprzewod owego
Rozdział 5. ♦ Sprzęt do transmisji bezprzewodowej 123 Rozdział 5. ♦ Sprzęt do transmisji bezprzewodo
Rozdział 5. ♦ Sprzęt do transmisji bezprzewodowej 125 Rozdział 5. ♦ Sprzęt do transmisji bezprzewodo
Rozdział 5. ♦ Sprzęt do transmisji bezprzewodowej 127 Rozdział 5. ♦ Sprzęt do transmisji bezprzewodo
Rozdział 5. ♦ Sprzęt do transmisji bezprzewodowej 129 Rozdział 5. ♦ Sprzęt do transmisji bezprzewodo
071 pcx Rozdział 4. ♦ Systemy cyfrowej transmisji bezprzewodowej 71 Jednym z podstawowych założeń te
073 pcx 73 Rozdział 4. ♦ Systemy cyfrowej transmisji bezprzewodowej ♦ kanały „w
075 pcx Rozdział 4. ♦ Systemy cyfrowej transmisji bezprzewodowej 75 Wieloramki służą następnie do tw
077 pcx Rozdział 4. ♦ Systemy cyfrowej transmisji bezprzewodowej 77 Standard GSM opisuje także dwie
079 pcx Rozdział 4. ♦ Systemy cyfrowej transmisji bezprzewodowej 79 kodera ma prędkość 32 kb/s. co z
085 pcx 85 Rozdział 4. ♦ Systemy cyfrowej transmisji bezprzewodowejStacje przekaźnikowe Protokół AX.
091 pcx 91 Rozdział 4. ♦ Systemy cyfrowej transmisji bezprzewodowej wym, z różnymi priorytetami, tak
093 pcx 93 Rozdział 4. ♦ Systemy cyfrowej transmisji bezprzewodowej Dla każdego rodzaju medium stoso
095 pcx Rozdział 4. ♦ Systemy cyfrowej transmisji bezprzewodowej 95 jętości kanału, zaś Random!•>
097 pcx 97 Rozdział 4. ♦ Systemy cyfrowej transmisji bezprzewodowej 8802.2). Ponadto standard zapewn
więcej podobnych podstron