grupaB
B
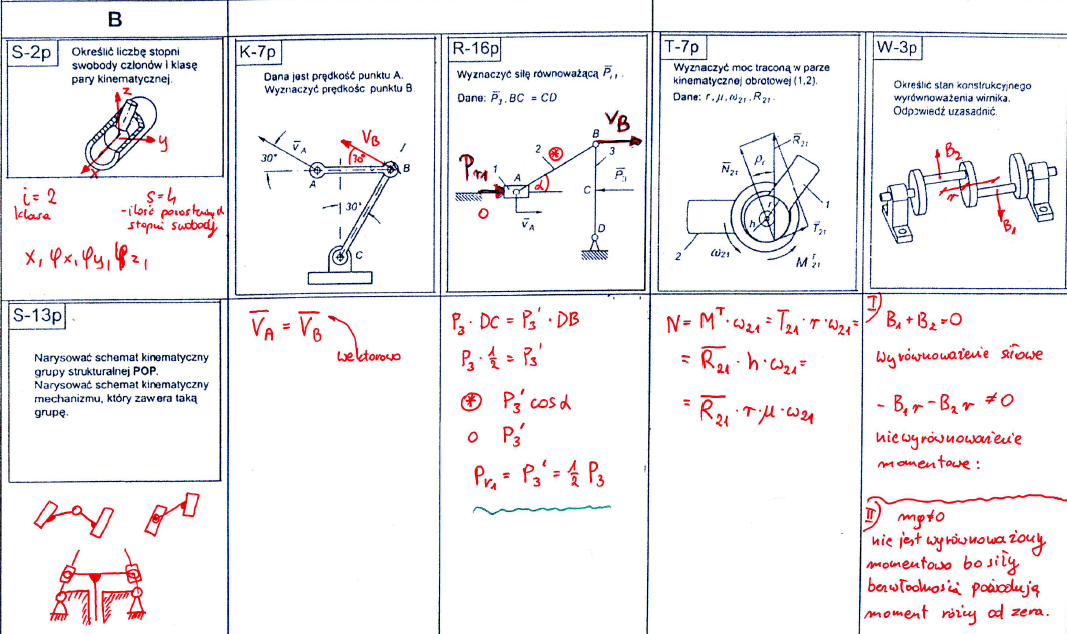
S-2p I Określić liczbę stopni
swobody członów I klasę pary kinematycznej
S’L,
-ibrź p?ior b-s, e*. stopu; Suotwc^,

2 (O*f«
W-3p
Określić stan konslrukcy-nego wyrćwnoważema wirnika. Odpowiedź uzasadnić
Narysować schemat kinematyczny grupy strukturalnej POP. Narysować schemat kinematyczny mechanizmu, który zawora taką grupę.


Wyszukiwarka
Podobne podstrony:
28694 Zdjęcie0281 (3) S-4p Określić liczbę stopni . swobody członów i klasę [/ pory kinematyczn
skanowanie0002 Liczbę stopni swobody w dla mechanizmu swobodnie poruszającego się w przestrzeni trój
i. Analiza strukturalna Podział par kinematycznych na klasy f- liczba względnych stopni swobody czło
LICZBA KOLUMN I WIERSZY WPŁYWA NA LICZBĘ STOPNI SWOBODY, które liczymy: r=(k-l)*(w-l) k-kolumny w-wi
CCF20110123�009 (3) I 3rzyjmij model i elementy skończoną - przedstawić na rysunku. Określ liczbą st
23 luty 07 (15) 1.1.4. Klasyfikacja par kinematycznych Przez klasę pary kinematycznej „i" (i =
Stopniami swobody ciała nazywamy liczbę niezależnych od siebie ruchów, określających położenia
skanuj0002 (2) co oznacza, ze należy ją rozumieć nieco inaczej niż ruchliwość pary kmemal Liczbę sto
finansowej związany jest zatem z określonym stopniem swobody podejmowania decyzji finansowych w zakr
tablica 3 Tablica G.2 Wartość tp(v) rozkładu t-Studenta o v stopniach swobody, określająca przedział
więcej podobnych podstron