Mechanika41
3. Ruch płaski - c.d.
Prędkość obrócona.
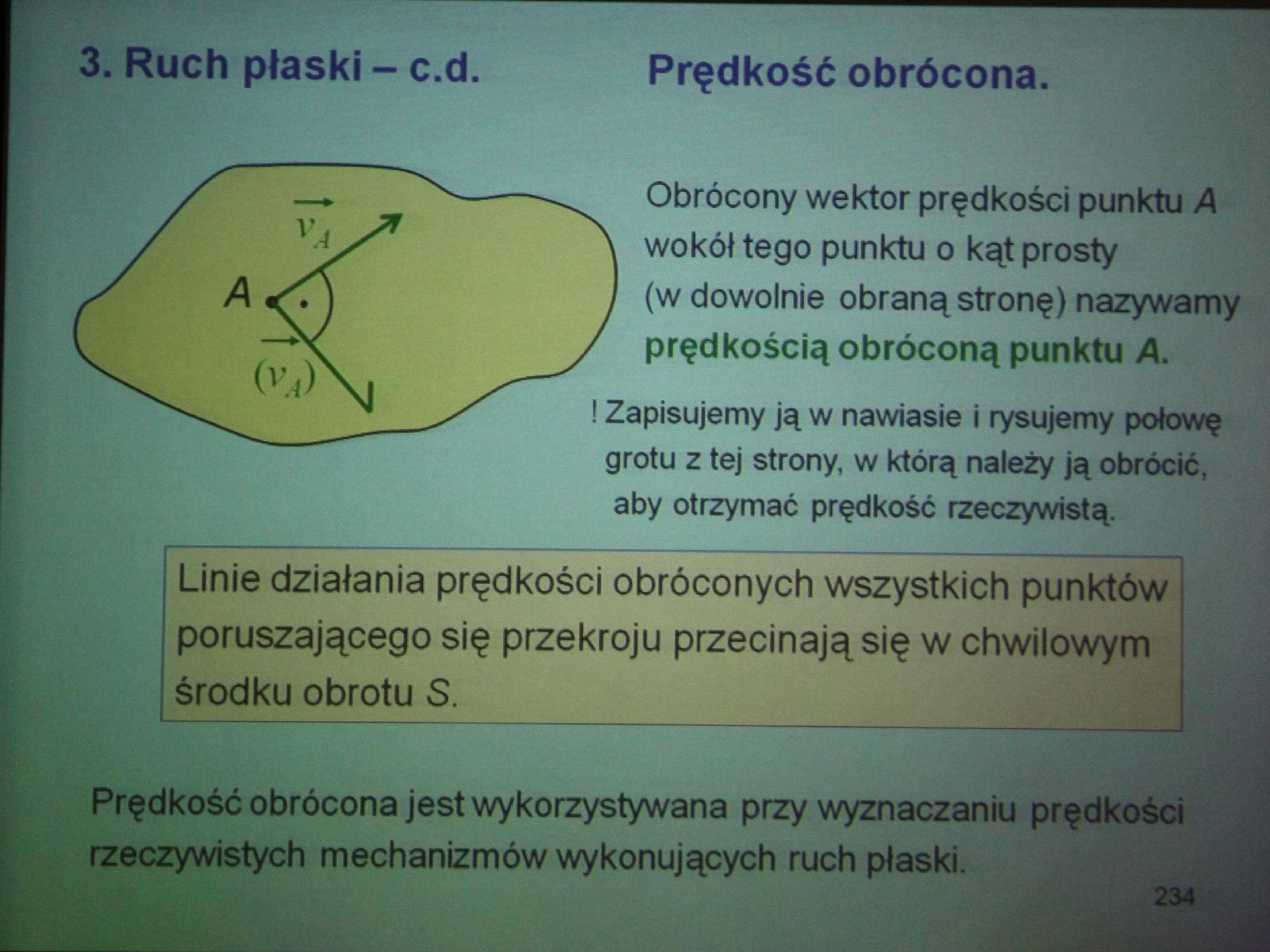
Obrócony wektor prędkości punktu A \ wokół tego punktu o kąt prosty \J (w dowolnie obraną stronę) nazywamy V prędkością obróconą punktu A
I Zapisujemy ją w nawiasie i rysujemy połowę grotu z tej strony, w którą należy ją obrócić; aby otrzymać prędkość rzeczywistą.
Linie działania prędkości obróconych wszystkich punktów I ■ poruszającego się przekroju przecinają się w chwilowym środku obrotu S.
Prędkość obrócona jest wykorzystywana przy wyznaczaniu prędkości rzeczywistych mechanizmów wykonujących ruch płaski.
Wyszukiwarka
Podobne podstrony:
Mechanika37 3. Ruch płaski - c.d.Twierdzenie o rzutach prędkości. Twierdzenie: •»
Mechanika40 3. Ruch płaski - c.d. A . , rB Prędkość dowolnego punktu P. vp = rp • (o - rp n i .Ył
Ruch płaski, prędkość i przyspieszenie punktu bryły %Ruch płaski bryły materialnejRuch płaski biyly
Mechanika42 Ruch płaski jako złożenie dwóch ruchów. A - biegun - wybrany dowolny punkt przekroju Ruc
Mechanika36 3. Ruch płaski. Charakteryzuje się tym, że wszystkie punkty ciała poruszają się w płaszc
35401 Mechanika38 3. Ruch płaski - c.d.Zastępcza oś obrotu. C - zastępczy środek obrotu. Rys. Ruch p
więcej podobnych podstron