silowniki�2
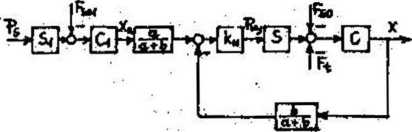
Z kolei przesunięcie trzpienia 'siłownika "x" Jest zależne od ciśnienia wyjściowego wzmacniacza, od siły wstępnego naciągu sprężyny siłownika F oraz od siły tarcia F+.
5C t
(2)
x = C(£ Pvy - Fsc - Ft)
Jest to równanie słuszne dla kierunku przesunięcia siłownik* zaznaczonego na rys, 5.6. Podobnie przesunięcie mieszka sygnału wejściowego Jest funkcją Jego parametrów (S., 1 C^) oraz ciśnienia sterującego Pg i siły wstępnego naciągu bprężyny mieszka ,Fso1«
xa * ci (Si Pa-P8o1) (3)
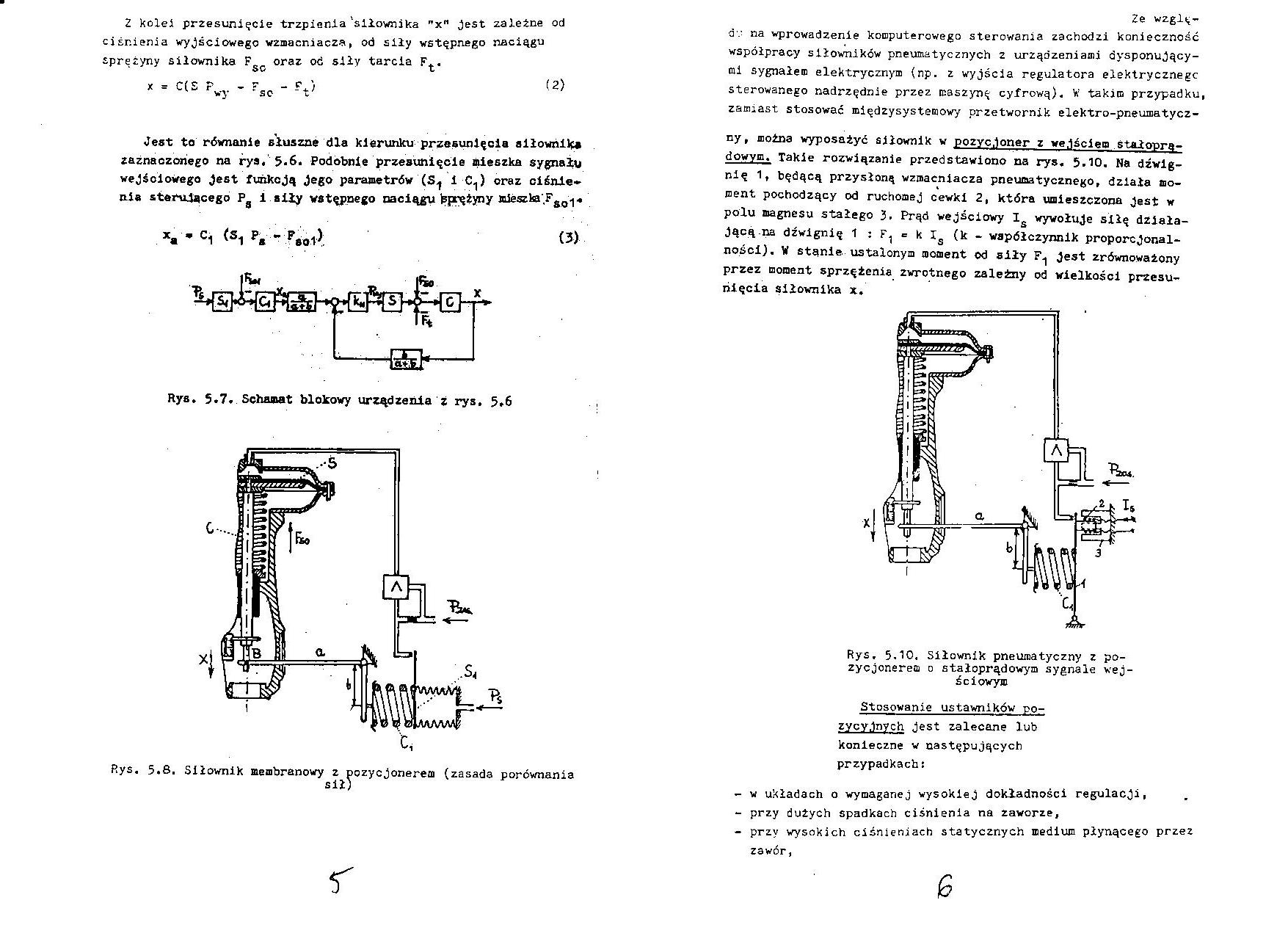
Rys. 5.7. Schemat blokowy urządzenia z rys. 5.6
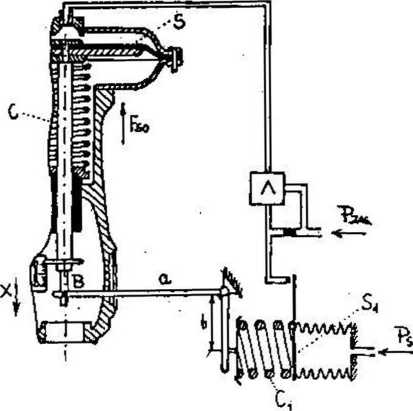
Rys. 5.8. Siłownik membranowy z pozycjonerem (zasada porównania
sił)
r
Ze wzglę-
d" na wprowadzenie komputerowego sterowania zachodzi konieczność współpracy siłowników pneumatycznych z urządzeniami dysponującymi sygnałem elektrycznym <np. z wyjścia regulatora elektrycznego sterowanego nadrzędnie przez maszynę cyfrową), W takim przypadku, zamiast stosować międzysystemowy przetwornik elektro-pneumatycz-
ny, można wyposażyć siłownik w pozycjoner z wejściem stałopra-dowym. Takie rozwiązanie przedstawiono na rys, 5.10. Na dźwignię 1, będącą przysłoną wzmacniacza pneumatycznego, działa moment pochodzący od ruchomej cewki 2, która umieszczona Jest w polu magnesu stałego 3. Prąd wejściowy J wywołuje siłę działającą na dźwignię 1 : F, = k I$ (k - wapółczynnlk proporcjonalności). W stanie ustalonym moment od siły F^ Jest zrównoważony przez moment sprzężenia zwrotnego zależny od wielkości przesunięcia siłownika x.
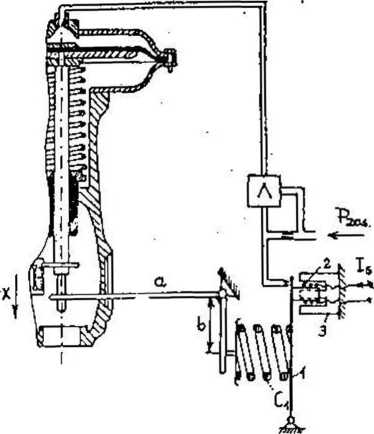
Rys. 5.10. Siłownik pneumatyczny z pożyć jonerem o stałoprądowym sygnale wejściowym
Stosowanie ustawnlków pozycyjnych jest zalecane lub konieczne w następujących przypadkach:
- w układach o wymaganej wysokiej dokładności regulacji,
- przy dużych spadkach ciśnienia na zaworze,
- przy wysokich ciśnieniach statycznych medium płynącego przez zawór,
e
Wyszukiwarka
Podobne podstrony:
silowniki�2 Z kolei przesunięcie trzpienia siłownika "x" Jest zależne od ciśnienia wyjści
skanuj0015 (231) Analogicznie reakcja instrumentalna, jeśli jest zalezna od jakiegoś sygnału, wystąp
img209 209 więc* energia promieniowania gazu Jest zależna od temp era tury gazu Tg oraz od iloczyn
Łożyska toczne - trwałość Trwałość jest zależna od obciążenia.L- Pq = const.q = 3 10 9 =
IMG880 (3) Poch / reeei Pochłanianie przez makro fagi zmodyfikowanych lipoproicin jest zależne od sc
Mąka przenna wodochłonnośc (3) * warte w mące. Chłonność wody jest zależna od ilości i jakości glute
Finanse p stwa Wypych 2 273 Wykorzystanie dźwigni w zarządzaniu przedsiębiorstwem Stopień dźwigni łą
Indukowany przez promieniowanie drgający moment dipolowy jest zależny od polaryzowalności
przy czym Pq nie jest zależne od częstotliwości, W układzie rzeczywistym na wejście podawane jest na
^ Makropolecenia warunkowe ■ Działanie akcji jest zależne od spełnienia lub nie zdefiniowanego warun
7 9.4.2. WYDAJNOŚĆ POMPY Wydajność pompy jest zależna od jej konstrukcji, ciśnienia tłoczenia
Wartość sygnału sterującego dla członu całkującego jest zależna od wartości uchybu w chwilach
HPIM1703 Rozstaw łat pod pokrycie dachówką Rozstaw łat jest zależny od długości krokwi i kata nachyl
więcej podobnych podstron