IMAG2594
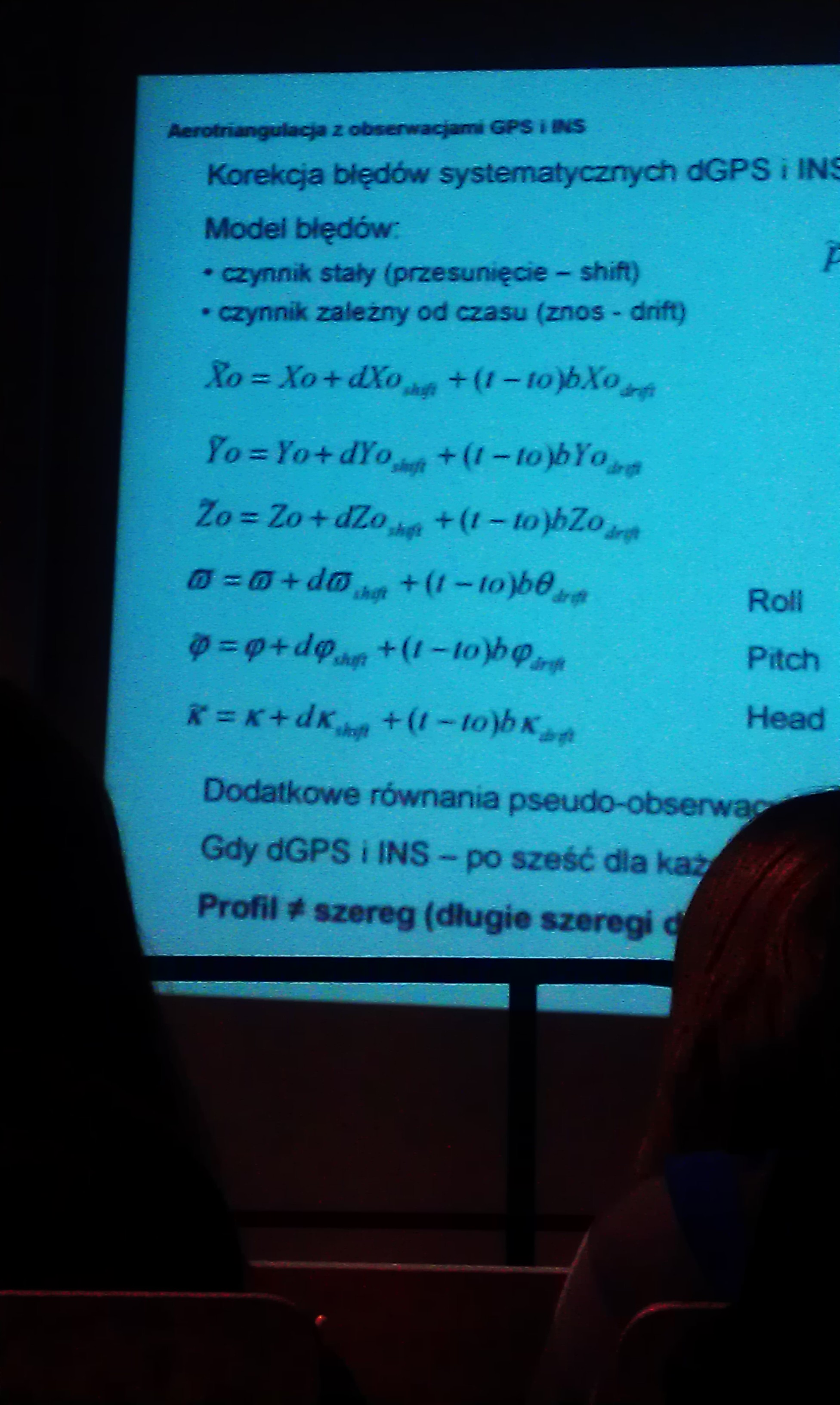

Korekcja błędów systematycznych <JGPS i INJ Model błędów
* czynił* stały (przesumęoe - Shift) /
• czyim* zależny od czasu (znos - dnft)
Xo — Xo + dXo tkf +(f — to )bXo^
?o = Yo+ dYo^ +(i-to)bYo+0 Zo = Zo + dZo^ +{t - ło\hZo^
|
0=0 + dCB kę +(/ - lo)b6^m |
Roi |
|
0 = P+dp^ + (/ |
Puch |
|
t = K+dK^ +(/-/o)A» |
Head |
Dodatkowe równania pseudo-obserw Gdy dGPS i ŁNS - po azesć cMa ProfM # izsreg (dfcjgto sartgl
Wyszukiwarka
Podobne podstrony:
55475 IMAG2595 mrtMgHtorfr * ttatnmtjmiś OPS i Itt Korekcja błędów systematycznych dGPS i INS Model
IMAG2595 mrtMgHtorfr * ttatnmtjmiś OPS i Itt Korekcja błędów systematycznych dGPS i INS Model błędów
IMAG2595 mrtMgHtorfr * ttatnmtjmiś OPS i Itt Korekcja błędów systematycznych dGPS i INS Model błędów
IMAG2595 mrtMgHtorfr * ttatnmtjmiś OPS i Itt Korekcja błędów systematycznych dGPS i INS Model błędów
Slajd24 (102) Korekcja błędów W systemie przesyłania danych - Bluetooth stosowane są trzy metody kor
EEC RAM - pamięci używane w serwerach, które miały możliwość korekcji błędów SDRAM występuje w
IMAG2567 Wpływ błędów orientacji zewnętrznej na X,Y,Z środek rzutu m C=Z>" Proces wyrównan
Pomiary ciśnienia. Czujniki piezorezystancyjne. Korekcja błędów czujników piezorezystancyjnych.
Wpływ niedociśnięcia kliszy eliminuje się częściowo w trakcie korekcji błędów orientacji zewnętrznej
Zakres funkcjonalny systemów informatycznych Typowy model (np. MIT’90) zakłada, że technologia
Inżynieria odwrotna - wprowadzenie W systemach 3D CAD model bryłowy lub powierzchniowy może zostać
więcej podobnych podstron