IMAG2595
mrtMgHtorfr * ttatnmtjmiś OPS i Itt
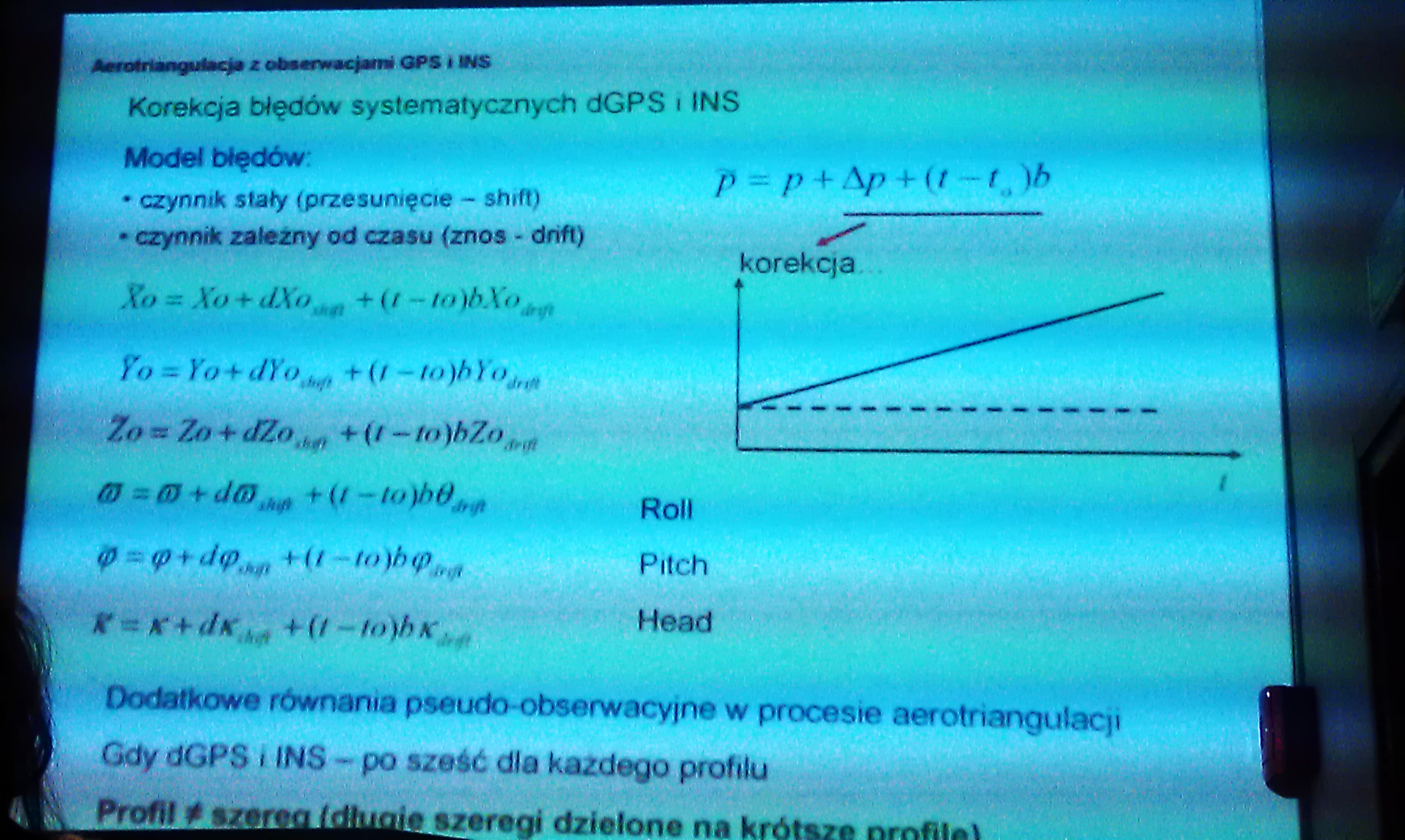
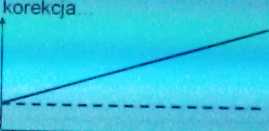
Korekcja błędów systematycznych dGPS i INS
Model błędów
* czynnik stały (przesunięcie - shift)
• czynnik zalezny od czasu (znos - dnft)
Xp = Xo + JXo + (/ - to)bXoih ,
Y<> = Yo+JYo^ +■ (/ - h>)h)nj ri 2» = Z? ♦ + </
(D ~G) v J(Dtk0 f- (/ - /o )ó#tfr//ł
p - p + \p + (t t )b
Roli
Pitch
Head
Oortelho^e równania pseudo-obserwacyjne w procesie aerołriangufac,, Gdy dGPS«INS - po azetć dla Każdego profilu
IdtMflif dzielone na krdtaze nr««..»
Wyszukiwarka
Podobne podstrony:
55475 IMAG2595 mrtMgHtorfr * ttatnmtjmiś OPS i Itt Korekcja błędów systematycznych dGPS i INS Model
IMAG2595 mrtMgHtorfr * ttatnmtjmiś OPS i Itt Korekcja błędów systematycznych dGPS i INS Model błędów
IMAG2595 mrtMgHtorfr * ttatnmtjmiś OPS i Itt Korekcja błędów systematycznych dGPS i INS Model błędów
IMAG2594 Korekcja błędów systematycznych <JGPS i INJ Model błędów * czynił* sta
Slajd24 (102) Korekcja błędów W systemie przesyłania danych - Bluetooth stosowane są trzy metody kor
EEC RAM - pamięci używane w serwerach, które miały możliwość korekcji błędów SDRAM występuje w
Pomiary ciśnienia. Czujniki piezorezystancyjne. Korekcja błędów czujników piezorezystancyjnych.
Wpływ niedociśnięcia kliszy eliminuje się częściowo w trakcie korekcji błędów orientacji zewnętrznej
Stanowisko nr 2.yyuŁR?® FX 412 Pro systemu DGPS Rys. 2.1. Odbiornik systemu DGPS typu FX 412 firmy M
więcej podobnych podstron