img254 (8)
248 Sieci rekurencyjr
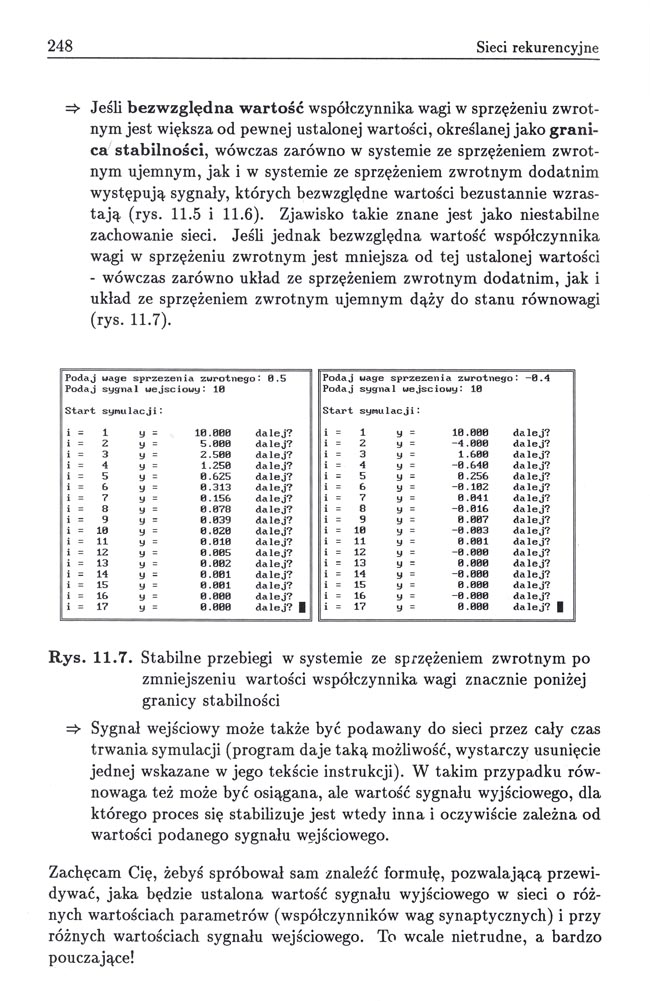
=> Jeśli bezwzględna wartość współczynnika wagi w sprzężeniu zwrotnym jest większa od pewnej ustalonej wartości, określanej jako granica stabilności, wówczas zarówno w systemie ze sprzężeniem zwrotnym ujemnym, jak i w systemie ze sprzężeniem zwrotnym dodatnim występują sygnały, których bezwzględne wartości bezustannie wzrastają (rys. 11.5 i 11.6). Zjawisko takie znane jest jako niestabilne zachowanie sieci. Jeśli jednak bezwzględna wartość współczynnika wagi w sprzężeniu zwrotnym jest mniejsza od tej ustalonej wartości - wówczas zarówno układ ze sprzężeniem zwrotnym dodatnim, jak i układ ze sprzężeniem zwrotnym ujemnym dąży do stanu równowagi (rys. 11.7).
Rys. 11.7. Stabilne przebiegi w systemie ze sprzężeniem zwrotnym po zmniejszeniu wartości współczynnika wagi znacznie poniżej granicy stabilności
=> Sygnał wejściowy może także być podawany do sieci przez cały czas trwania symulacji (program daje taką możliwość, wystarczy usunięcie jednej wskazane w jego tekście instrukcji). W takim przypadku równowaga też może być osiągana, ale wartość sygnału wyjściowego, dla którego proces się stabilizuje jest wtedy inna i oczywiście zależna od wartości podanego sygnału wgjściowego.
Zachęcam Cię, żebyś spróbował sam znaleźć formulę, pozwalającą przewidywać, jaka będzie ustalona wartość sygnału wyjściowego w sieci o różnych wartościach parametrów (współczynników wag synaptycznych) i przy różnych wartościach sygnału wejściowego. To wcale nietrudne, a bardzo pouczające!
Wyszukiwarka
Podobne podstrony:
img168 (9) 162 uczenia sieci neuronowych Zbyt duża wartość współczynnika uczenia jest jednak także n
img063 (30) wartość współczynnika wagi chą zapach. chnące, jednak ze zdecydowaną przewagą dla koloró
img063 (30) wartość współczynnika wagi chą zapach. chnące, jednak ze zdecydowaną przewagą dla koloró
img063 (30) wartość współczynnika wagi chą zapach. chnące, jednak ze zdecydowaną przewagą dla koloró
Image109 Jeśli sprzężenie zwrotne jest tzw. bezpośrednim, pełnym i jednostkowym sprzężeniem zwrotnym
img093 (18) Elementarne wprowadzenie do techniki sieci neuronowych 87 wartości współczynnika określa
13235 img256 (8) 250 Sieci rekurencyjr wartości) oraz zachowania niestabilne - kolejne wartości sygn
3tom114 3. SIECI ELEKTROENERGETYCZNE Wartości współczynników korekcyjnych impedancji zwarciowych dla
7 013 - 248 - Wartości współczynnika Ł, określa się prawie wyłącznie na podstawie badań doświadczaln
Rodzaj sygnału Postać sygnału Wartość średnia bezwzględna Wartość skuteczna Współczynnik
więcej podobnych podstron