img255 (8)
249
Elementarne wprowadzenie do techniki sieci neuronowych

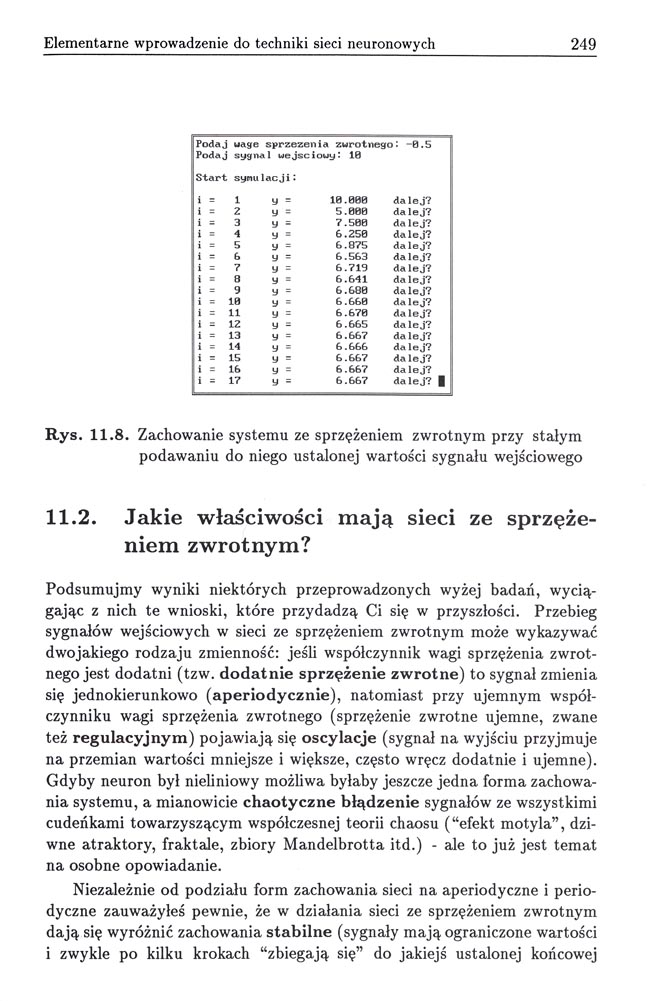
Rys. 11.8. Zachowanie systemu ze sprzężeniem zwrotnym przy stałym podawaniu do niego ustalonej wartości sygnału wejściowego
11.2. Jakie właściwości mają sieci ze sprzężeniem zwrotnym?
Podsumujmy wyniki niektórych przeprowadzonych wyżej badań, wyciągając z nich te wnioski, które przydadzą Ci się w przyszłości. Przebieg sygnałów wejściowych w sieci ze sprzężeniem zwrotnym może wykazywać dwojakiego rodzaju zmienność: jeśli współczynnik wagi sprzężenia zwrotnego jest dodatni (tzw. dodatnie sprzężenie zwrotne) to sygnał zmienia się jednokierunkowo (aperiodycznie), natomiast przy ujemnym współczynniku wagi sprzężenia zwrotnego (sprzężenie zwrotne ujemne, zwane też regulacyjnym) pojawiają się oscylacje (sygnał na wyjściu przyjmuje na przemian wartości mniejsze i większe, często wręcz dodatnie i ujemne). Gdyby neuron był nieliniowy możliwa byłaby jeszcze jedna forma zachowania systemu, a mianowicie chaotyczne błądzenie sygnałów ze wszystkimi cudeńkami towarzyszącym współczesnej teorii chaosu (“efekt motyla”, dziwne atraktory, fraktale, zbiory Mandelbrotta itd.) - ale to już jest temat na osobne opowiadanie.
Niezależnie od podziału form zachowania sieci na aperiodyczne i periodyczne zauważyłeś pewnie, że w działania sieci ze sprzężeniem zwrotnym dają się wyróżnić zachowania stabilne (sygnały mają ograniczone wartości i zwykle po kilku krokach “zbiegają się” do jakiejś ustalonej końcowej
Wyszukiwarka
Podobne podstrony:
img163 (9) Elementarne wprowadzenie do techniki sieci neuronowych 157 Jak widać - system mający
img159 (11) 153 Elementarne wprowadzenie do techniki sieci neuronowych Rys. 8.16. Wzorzec nowego zad
img161 (8) 155 Elementarne wprowadzenie do techniki sieci neuronowych Rys. 8.20. Początkowy etap ucz
img015 (68) Elementarne wprowadzenie do techniki sieci neuronowych totne jest tylko to, że neurony s
img023 (60) Elementarne wprowadzenie do techniki sieci neuronowych z ocenami nauczyciela). Wielkość
więcej podobnych podstron