P1050613
4.
Projektowanie sekwencyjnych układów automatyki
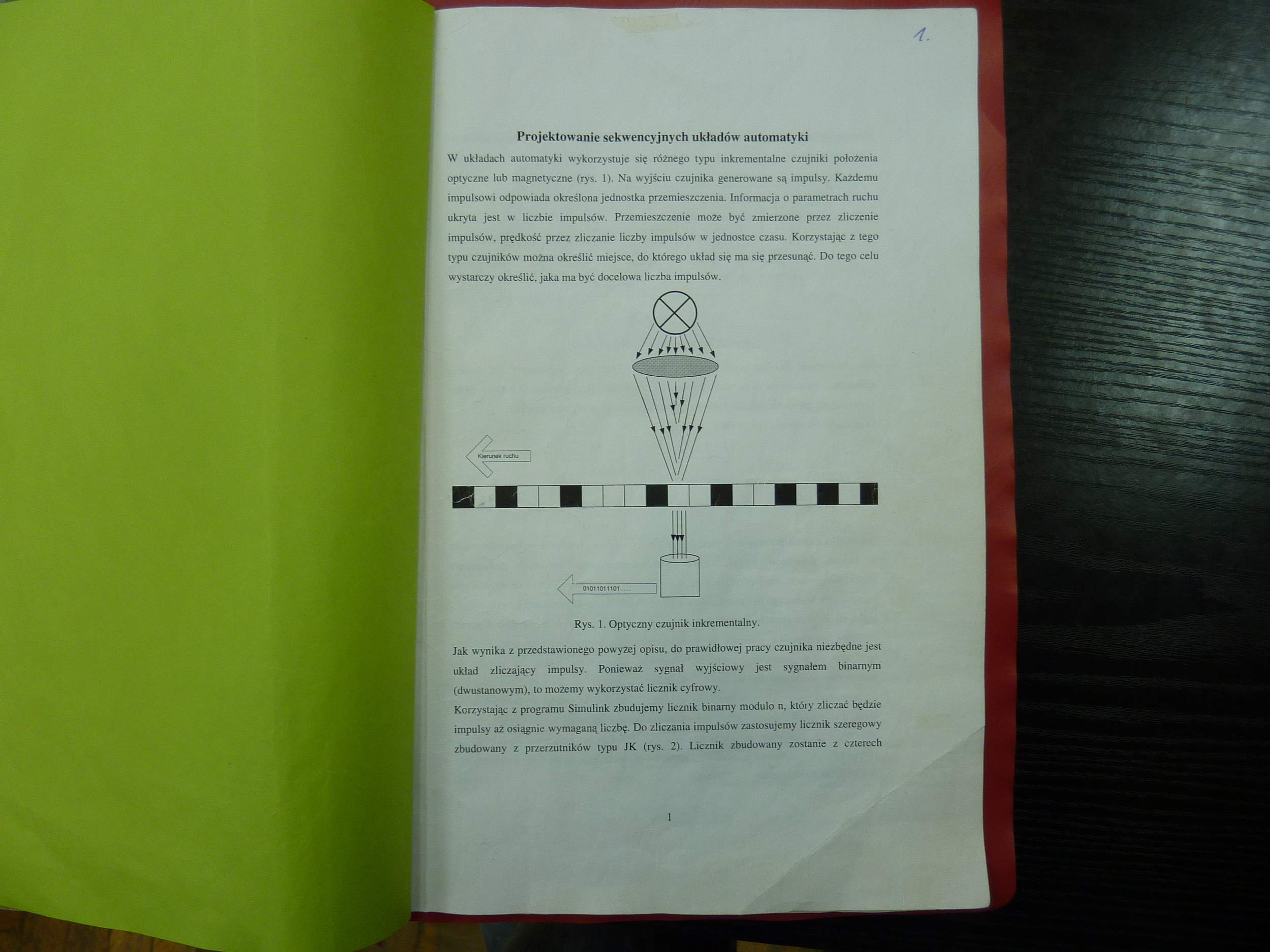
W układach automatyki wykorzystuje się różnego typu inkrementalne czujniki położenia optyczne lub magnetyczne (rys. 1). Na wyjściu czujnika generowane są impulsy. Każdemu impulsowi odpowiada określona jednostka przemieszczenia. Informacja o parametrach ruchu ukryta jest w liczbie impulsów. Przemieszczenie może być zmierzone przez zliczenie impulsów, prędkość przez zliczanie liczby impulsów w jednostce czasu. Korzystając z tego typu czujników można określić miejsce, do którego układ się ma się przesunąć. Do tego celu wystarczy określić, jaka ma być docelowa liczba impulsów.
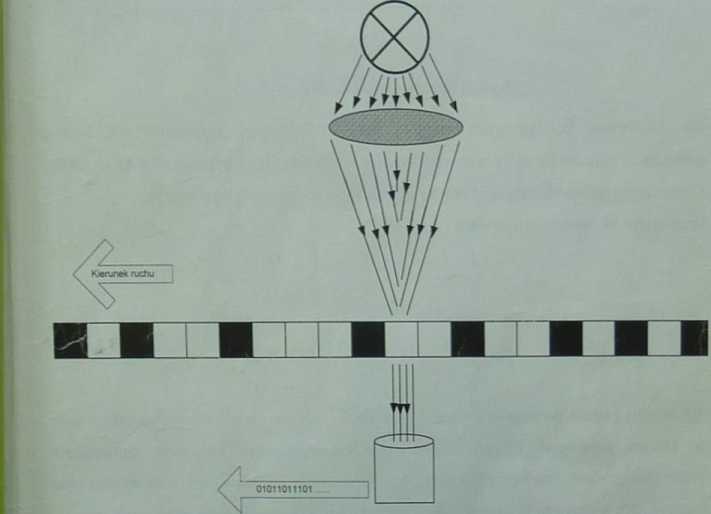
Rys. 1. Optyczny czujnik inkrementalny.
Jak wynika z przedstawionego powyżej opisu, do prawidłowej pracy czujnika niezbędne jest układ zliczający impulsy. Ponieważ sygnał wyjściowy jest sygnałem binarnym (dwustanowym), to możemy wykorzystać licznik cyfrowy.
Korzystając z programu Simulink zbudujemy licznik binarny modulo n, któiy zliczać będzie impulsy aż osiągnie wymaganą liczbę. Do zliczania impulsów zastosujemy licznik szeregowy zbudowany z przerzutników typu JK (rys. 2). Licznik zbudowany zostanie z czterech
1
Wyszukiwarka
Podobne podstrony:
DSC01086 (12) Projektowanie sekwencyjnych układów automatyki W układach automatyki wykorzystuje się
Laboratorium z Podstaw AutomatykiLaboratorium nr 3Projektowanie układów automatyki z wykorzystaniem
58075 Zdjęcie185 (2) Projektowanie statyczne i dynamiczne hydraulicznych układów automatyki opiera&n
ScanImage03 (4) 16) Do klasy liniowych układów automatyki stosuje się kryterium stabilności: Hurwitz
Jako materiał do prowadzenia hodowli komórkowej można wykorzystywać w szczególności różnego typu
Do zapisu przebiegu sygnałów w pomiarach dynamicznych wykorzystuje się różnego rodzaju rejestratory.
W3 wykorzystywanego do projektowania układów automatyki w zakresie:
ZADANIE PROJEKTOWE NR 3Modelowanie układu sekwencyjnego w postaci automatu skończonego typu Mealy’eg
nowych układów automatyki przeciwawaryjnej. Projekt badawczy zamawiany nr PBZ-MEiN-1/2/2006, zadanie
Automatyka i Robotyka * oraz: > współpracować przy projektowaniu układów automatyki i robotyki,
Zdjęcie0121 (7) ANALIZA DYNAMICZNA HYDRAULICZNYCH UKŁADÓW AUTOMATYKI W przypadku projektowania hydra
więcej podobnych podstron