DSC01086 (12)
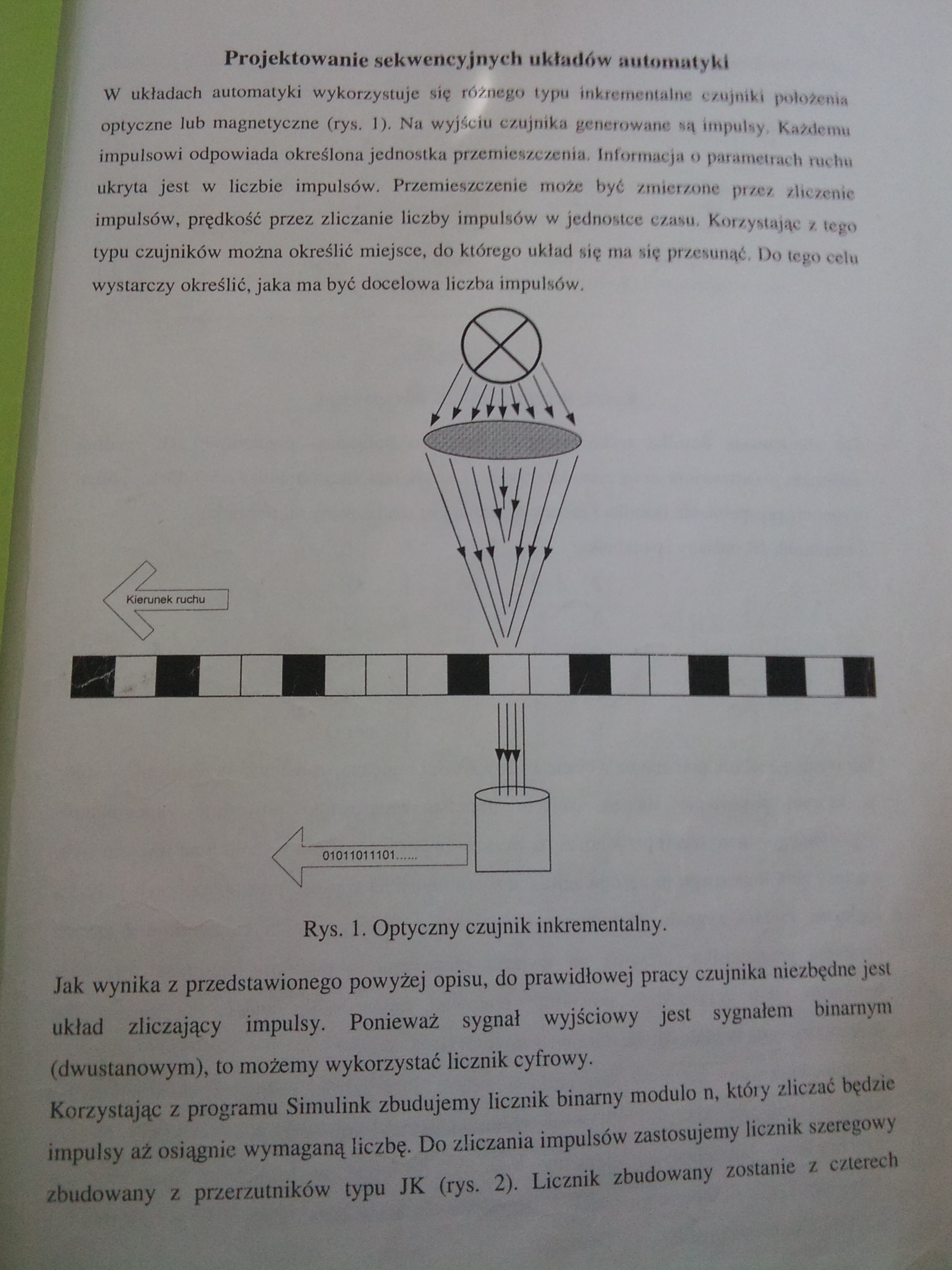
Projektowanie sekwencyjnych układów automatyki W układach automatyki wykorzystuje się różnego typu inkrcmcntsilne czujniki położeni optyczne lub magnetyczne (rys. 1). Nu wyjściu czujnika generowane tg impuUy, Knżdetm impulsowi odpowiada określona jednostka przemieszczenia, Informacja o parametrach m hi ukryta jest w liczbie impulsów. Przemieszczenie może być zmierzone przez zlicz e impulsów, prędkość przez zliczanie liczby impulsów w jednostce czasu, Korzystając y ,0 typu czujników można określić miejsce, do którego układ się ma się przesunąć, |)() tc , wystarczy określić, jaka ma być docelowa liczba impulsów.
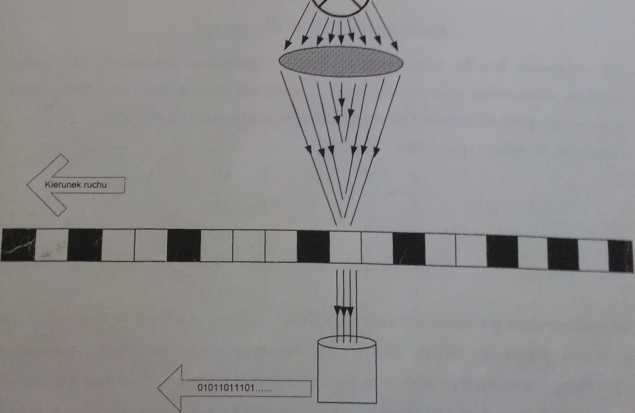
Rys. 1. Optyczny czujnik inkrementalny.
Jak wynika z przedstawionego powyżej opisu, do prawidłowej pracy czujnika niezbędne jest układ zliczający impulsy. Ponieważ sygnał wyjściowy jest sygnałem binarnym (dwustanowym), to możemy wykorzystać licznik cyfrowy.
Korzystając z programu Simulink zbudujemy licznik binarny modulo n, któiy zliczać będzie impulsy aż osiągnie wymaganą liczbę. Do zliczania impulsów zastosujemy licznik szeregowy zbudowany z przerzutników typu JK (rys. 2). Licznik zbudowany zostanie z czterech
Wyszukiwarka
Podobne podstrony:
P1050613 4.Projektowanie sekwencyjnych układów automatyki W układach automatyki wykorzystuje się róż
58075 Zdjęcie185 (2) Projektowanie statyczne i dynamiczne hydraulicznych układów automatyki opiera&n
Laboratorium z Podstaw AutomatykiLaboratorium nr 3Projektowanie układów automatyki z wykorzystaniem
ScanImage03 (4) 16) Do klasy liniowych układów automatyki stosuje się kryterium stabilności: Hurwitz
HP0001 12 Kategorie komparatystyki Niektóre rozdziały niniejszej książki były publikowane w różnego
ZADANIE PROJEKTOWE NR 3Modelowanie układu sekwencyjnego w postaci automatu skończonego typu Mealy’eg
nowych układów automatyki przeciwawaryjnej. Projekt badawczy zamawiany nr PBZ-MEiN-1/2/2006, zadanie
W3 wykorzystywanego do projektowania układów automatyki w zakresie:
Automatyka i Robotyka * oraz: > współpracować przy projektowaniu układów automatyki i robotyki,
Zdjęcie0121 (7) ANALIZA DYNAMICZNA HYDRAULICZNYCH UKŁADÓW AUTOMATYKI W przypadku projektowania hydra
zakresie projektowania systemów pomiarowych i układów automatyki, absolwent Politechniki Wrocławskie
więcej podobnych podstron