P1080315

9. Układy sensoryczne
9.2. Układy pomiarowe położenia i przemieszczenia
Pewną odmianą induktosyna liniowego jest induktosyn taśmowy wykonany 2e sprężystej taśmy stalowej, na której są umieszczone miedziane uzwojenia. Induktosyn taśmowy może być dostarczany w odcinkach o długości do 1800 mm.
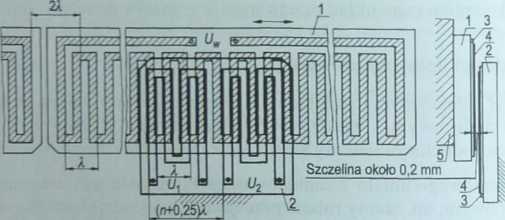
Zasada działania induktosyna jest bardzo podobna do selsyna przelicznikowego, można analizować go jak rozwinięty selsyn. Na rysunku 9.6 przedstawiono ideę działania induktosyna liniowego. Funkcję stojana pełni w tym przy. padku suwak, na którym naniesiono metodami fotochemigraficznymi dwa prostokątne uzwojenia, o podziałce A = 2 mm, przesunięte względem siebie
0 1/4 podziałki. Natomiast segmentowy liniał spełnia funkcję wirnika i ma jedno prostokątne uzwojenie. Uzwojenia suwaka są zasilane prądem przemiennym (/,
1 U2, podobnie jak stojan rezolwera. Napięcia U\ i U2 indukują w uzwojeniu suwaka napięcie U w, będące funkcją położenia suwaka, bowiem amplituda tego sygnału zależy od wzajemnego położenia przewodów suwaka i liniału. Okresowość sygnału wyjściowego wynika z podziałki X uzwojeń suwaka i liniału. Induktosyn,

Rysunek 9.7 . . _ r —-—
276 Układy uzwojeń induktosyna obrotowego: a) uzwojenia stojana, b) uzwojeń'3 vV,rn
podobnie jak selsyn przelicznikowy, może pracować zarówno w układzie przesuwania fazy, jak i sterowania amplitudowego.
W robotach są stosowane induktosyny obrotowe do pomiaru przemieszczeń kątowych. Wówczas uzwojenia suwaka i liniału znajdują się na dwóch współosiowych tarczach, których układy uzwojeń pokazano na rys. 9.7. Dokładność jnduktosynów liniowych może wynosić ±2,5 pm, a induktosynów obrotowych ±3'.
9.2.4. Przetwornik obrotowo-impulsowy i liniał kreskowy
Przetworniki obrotowo-impulsowe i liniały kreskowe należą do grupy fotoelek-iiycznych przetworników impulsowych. Są one budowane w wersji obrotowej (przetwornik obrotowo-impulsowy) i liniowej (liniał kreskowy). Znacznie większe zastosowanie w robotach i obrabiarkach sterowanych numerycznie znalazły przetworniki obrotowe.
Fotoelektryczny przetwornik obrotowo-impulsowy, zwany też en-koderem, pracuje w sposób przyrostowy i wysyła określoną liczbę impulsów oa jeden obrót. Zasadę jego działania przedstawiono na rys. 9.8 [84].
Na tarczy kreskowej 6 (rys. 9.8) są umieszczone promieniowo na przemian przezroczyste i'nieprzezroczyste paski (pola zakreskowane), a w przysłonie 4 dwa okręgi pasków przesuniętych względem siebie o 1/4 podziałki. Podczas obracania się tarczy stan oświetlenia dwóch fotoelementów zmienia się, jak to pokazano na iys. 9.8c. Wyjściowe przebiegi elektryczne są ukształtowane w układzie elektronicznym w formie impulsów prostokątnych, przesuniętych fazowo względem siebie. Umożliwia to wykrycie kierunku obrotu tarczy. Na rysunku 9.9 przedstawiono w uproszczeniu budowę przetwornika z podwójną liczbą fotoelementów (Heidenhain), co poprawia pewność i dokładność jego działania.

Zasada działania rotoelektrycznego przetwornika obrotowo-impulsowego: a) oświetlacz i fotoelementy, b) prążki na obrotowej tarczy kreskowej, c) zmiany oświetlenia fotoelementów i sygnały'elektryczne; I i 2 - pola widzenia fotoelementów, 3 i 8 - fotoelementy.
4 - przysłona z dwoma paskami prążków, 5 - oświetlacz, 6 - obrotowa tarcza kreskowa,
7-przebiegi wyjściowych sygnałów elektrycznych 277
Rysunek 9^^__
Wzajemne położenie przewodów suwaka i liniału w induktosynie; 1 - liniał z uzwojeniem wtórnym, 2 - suwak z uzwojeniami pierwotnymi, 3 — warstwa izolacyjna, 4 - folia miedziana, 5 - zespół przesuwny
Wyszukiwarka
Podobne podstrony:
SDC13024 b- Ax Rys. 3.31 Przykłady pomiaru położenia i przemieszczenia Podział ten w zasadzie dotycz
30031 P1080313 9. Układy sensoryczne Rysunek^__ Klasyfikacja stosowanych w robotach przemysłowych uk
P1080319 9. Układy sensoryczne 9.4.2. Przetworniki siły i naprężeń Wyposażenie chwytaka w przetworni
P1080324 9. Układy sensoryczne - odległości między charakterystycznymi punktami ob
więcej podobnych podstron