30031 P1080313

9. Układy sensoryczne
Rysunek^__
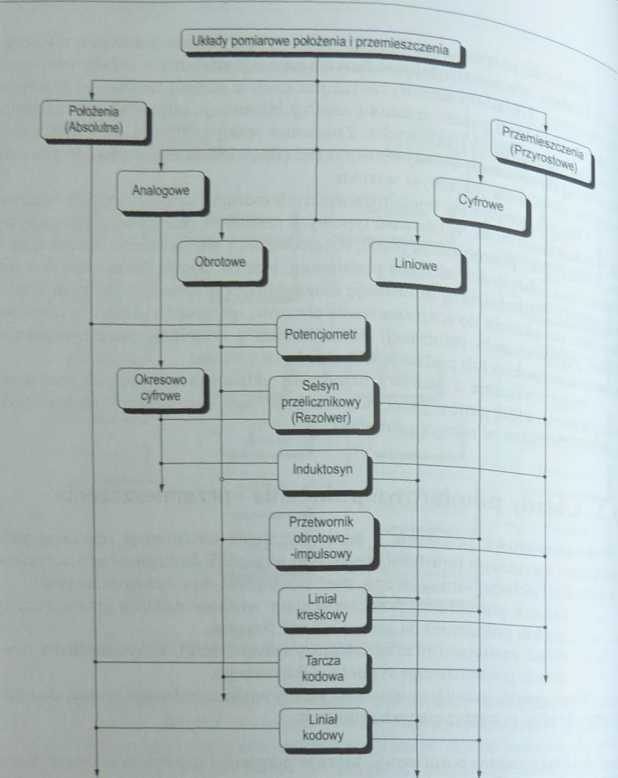
Klasyfikacja stosowanych w robotach przemysłowych układów pomiarowych pr/enites** czcnia i położenia
Klasyfikację układów pomiarowych przemieszczenia i położenia (rys.^ przeprowadzono, uwzględniając następujące wyróżniki:
1. Podział na układy pomiarowe położenia (absolutne) i przemieszczeń 272 (przyrostowe, inkrementalne) wykonano ze względu na układ odniesienia.
2. Pomiar absolutny (położenia) jest wtedy, gdy wszystkie pomiary są prowadzone względem wspólnego punktu zerowego (początek układu współ-rzędnych).
3. Pomiar przyrostowy (przemieszczenia) jest wówczas, gdy wielkość przemieszczenia jest mierzona wrzględem dowolnie obranego punktu odniesienia.
Cechą charakterystyczną robotów z układami pomiaru przemieszczenia jest konieczność rozpoczynania pracy (także po zaniku napięcia w sieci) od punktu bazowego (zwanego także referencyjnym), w którym następuje wyzerowanie liczników i inicjacja działania układu pomiarowego.
Podział na układy* analogowe i cyfrowe wynika z charakteru sygnałów generowanych przez czujnik. Można tu jeszcze wyróżnić układy, w których sygnał analogowy występuje okresowo, a okresy te zliczane są cyfrow o.
Podział na układy> obrotowe i liniowe uwzględnia rodzaj ruchu mierzonego przez czujnik pomiarowy. Ponadto, ze względu na zgodność ruchów wykonywanych przez czujnik i zespół robota, można wyróżnić układy:
- bezpośrednie, gdy rodzaj ruchu jest zgodny,
- pośrednie, gdy pomiar odbywa się z zastosowaniem przekładni przekształcającej ruch, np. ruch postępowy na ruch obrotowy.
9.2.1. Potencjometr pomiarowy
Najprostszą formą czujnika analogowego jest potencjometr prądu stałego (rys. 9.3).
Czujnik taki podaje wartość położenia kątowego <p w postaci napięcia L\ pod jakim znajduje się szczotka

(9.1)
Potencjometry są stosowane w robotach jako absolutne układy pomiarowe w napędach ruchu lokalnego, np. w napędach ruchu obrotowego chwytaków, lam gdzie kąt obrotu jest mniejszy od 360°, a także w tanich robotach dydaktycznych i zabawkowych. Wadą potencjometrów jest ich niska trwałość.
4

u

Wyszukiwarka
Podobne podstrony:
48427 P1080320 9, Układy sensoryczne Rysunek 9.18___________ Budowa pneumatycznej „sztucznej skóry&q
40754 P1080323 9. Układy sensoryczne Rysunek 9.26 Łi/Ti v_ Schemat blokowy układu wizyjnego robotów
Rys. 3.27. Klasyfikacja stosowanych w obrabiarkach CNC układów pomiarowych przemieszczenia i
67726 P1080325 9. Układy sensoryczne ruchu ramienia robota przy różnych jego ustawieniach. Kalibracj
więcej podobnych podstron