48427 P1080320
9, Układy sensoryczne
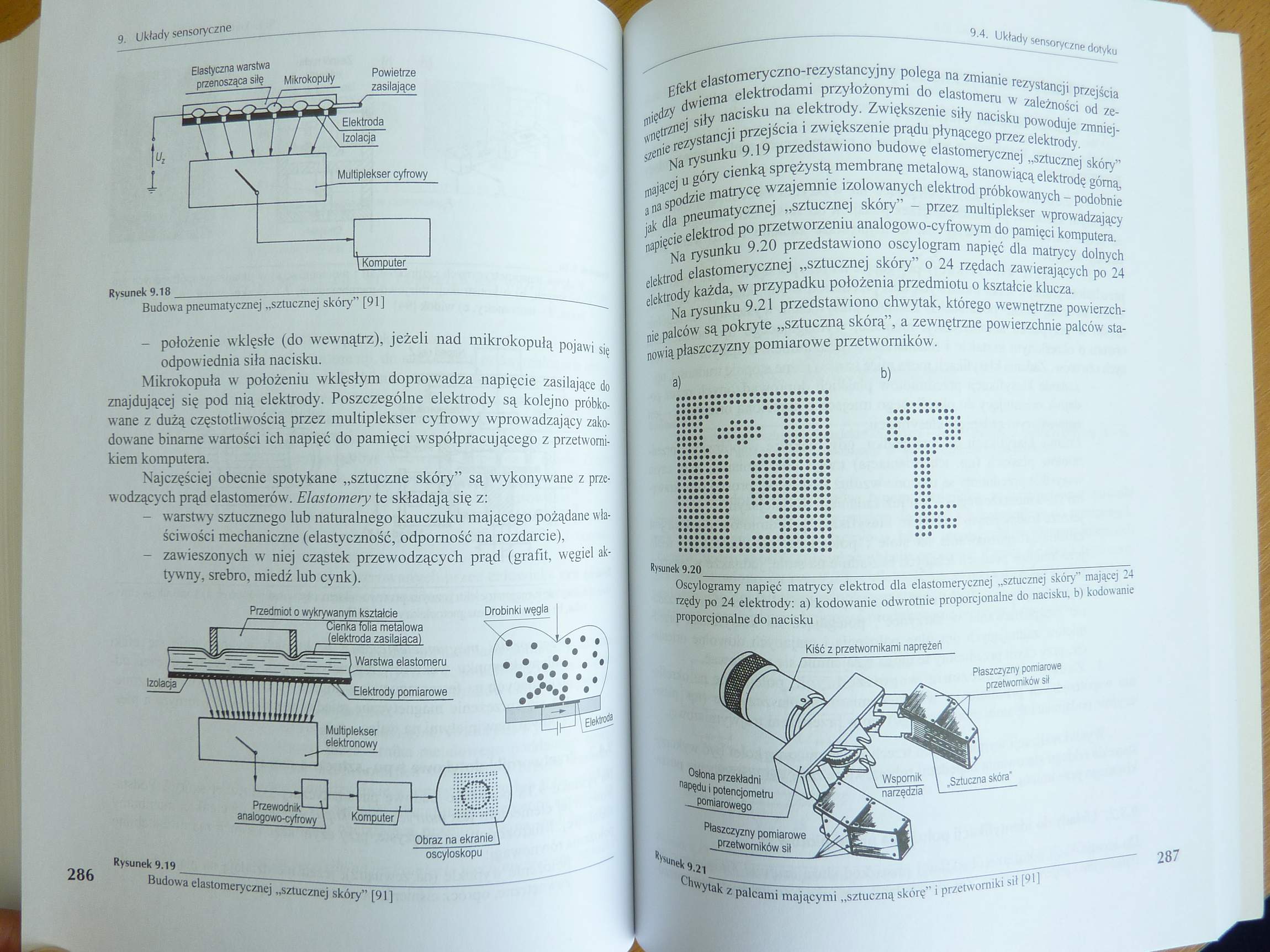
Rysunek 9.18___________
Budowa pneumatycznej „sztucznej skóry" [91]
- położenie wklęsłe (do wewnątrz), jeżeli nad mikokopułą poi odpowiednia siła nacisku.
Mitokopuła w położeniu wklęsłym doprowadza napięcie zasilają znajdującej się pod nią elektrody. Poszczególne elektrody są kolejno pm wane z dużą częstotliwością przez multiplekser cyfrowy wprowadzającym dowane binarne wartości ich napięć do pamięci współpracującego zprzetworm kiem komputera.
Najczęściej obecnie spotykane „sztuczne skóry" są wykonywane z prze-a wodzących prąd elastomerów. Elastomery te składają się z:
- warstwy sztucznego lub naturalnego kauczuku mającego pożądane ń-m ściwości mechaniczne (elastyczność, odporność na rozdarcie),
- zawieszonych w niej cząstek przewodzących prąd (grafit, węgiel i-tywny, srebro, miedź lub cynk).
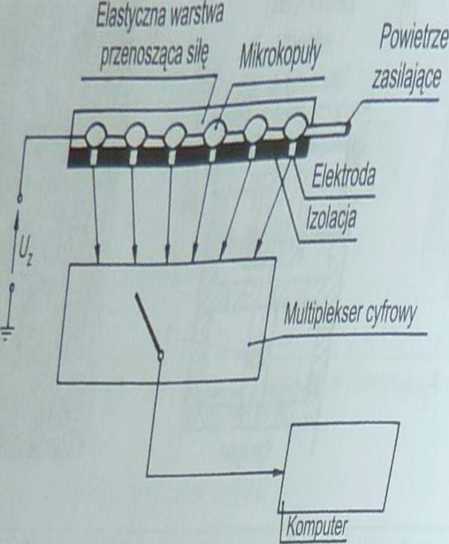
Efekf^l^totneryczno-rezystancyj ny polega na zmianie rezystancji przejścia między dwiema elektrodami przyłożonymi do elastomeru w zależności od zewnętrznej siły nacisku na elektrody. Zwiększenie siły nacisku powoduje zmniejszenie rezystancji przejścia i zwiększenie prądu płynącego przez elektrody.
Na rysunku 9.19 przedstawiono budowę elastomerycznej „sztucznej skóry” mającej u góry cienką sprężystą membranę metalową stanowiącą elektrodę górną a na spodzie matrycę wzajemnie izolowanych elektrod próbkowanych - podobnie jak dla pneumatycznej „sztucznej skóry” - przez multiplekser wprowadzający napięcie elektrod po przetworzeniu analogowo-cyfrowym do pamięci komputera.
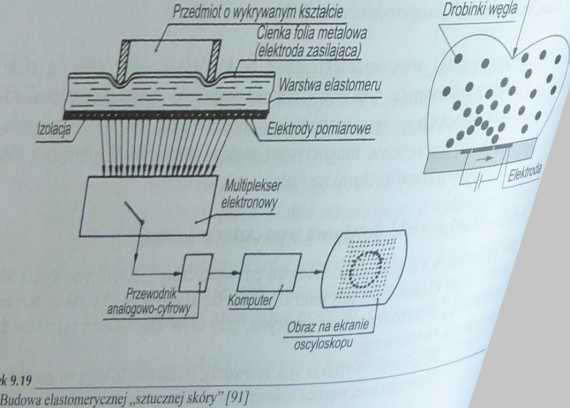
Na rysunku 9.20 przedstawiono oscylogram napięć dla matrycy dolnych elektrod elastomerycznej „sztucznej skóry” o 24 rzędach zawierających po 24 elektrody każda, w przypadku położenia przedmiotu o kształcie klucza.
Na rysunku 9.21 przedstawiono chwytak, którego wewnętrzne powierzchnie palców są pokryte „sztuczną skórą”, a zewnętrzne powierzchnie palców stanowią płaszczyzny pomiarowe przetworników.
i
b)

MM • • •
»••••
»••••
• ••••
:::::: ••••••••••••••••••••••••
Rysunek9.20^_
Oscylogramy napięć matrycy elektrod dla elastomerycznej „sztucznej skóry” mającej 24 rzędy po 24 elektrody: a) kodowanie odwrotnie proporcjonalne do nacisku, b) kodowanie proporcjonalne do nacisku
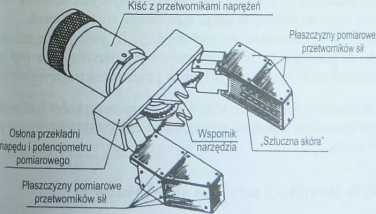
fysunek 9.21 ____
Chwytak z palcami mającymi „sztuczną skórę” i przetworniki sił [91]
287
Wyszukiwarka
Podobne podstrony:
30031 P1080313 9. Układy sensoryczne Rysunek^__ Klasyfikacja stosowanych w robotach przemysłowych uk
40754 P1080323 9. Układy sensoryczne Rysunek 9.26 Łi/Ti v_ Schemat blokowy układu wizyjnego robotów
P1080327 9. Układy sensoryczne b) Przetwornik Dyskryminator fotooptyczny fezy Rysu
P1080319 9. Układy sensoryczne 9.4.2. Przetworniki siły i naprężeń Wyposażenie chwytaka w przetworni
P1080324 9. Układy sensoryczne - odległości między charakterystycznymi punktami ob
67726 P1080325 9. Układy sensoryczne ruchu ramienia robota przy różnych jego ustawieniach. Kalibracj
więcej podobnych podstron