P1080327
9. Układy sensoryczne
b) Przetwornik Dyskryminator
fotooptyczny fezy

Rysunek 9 ______
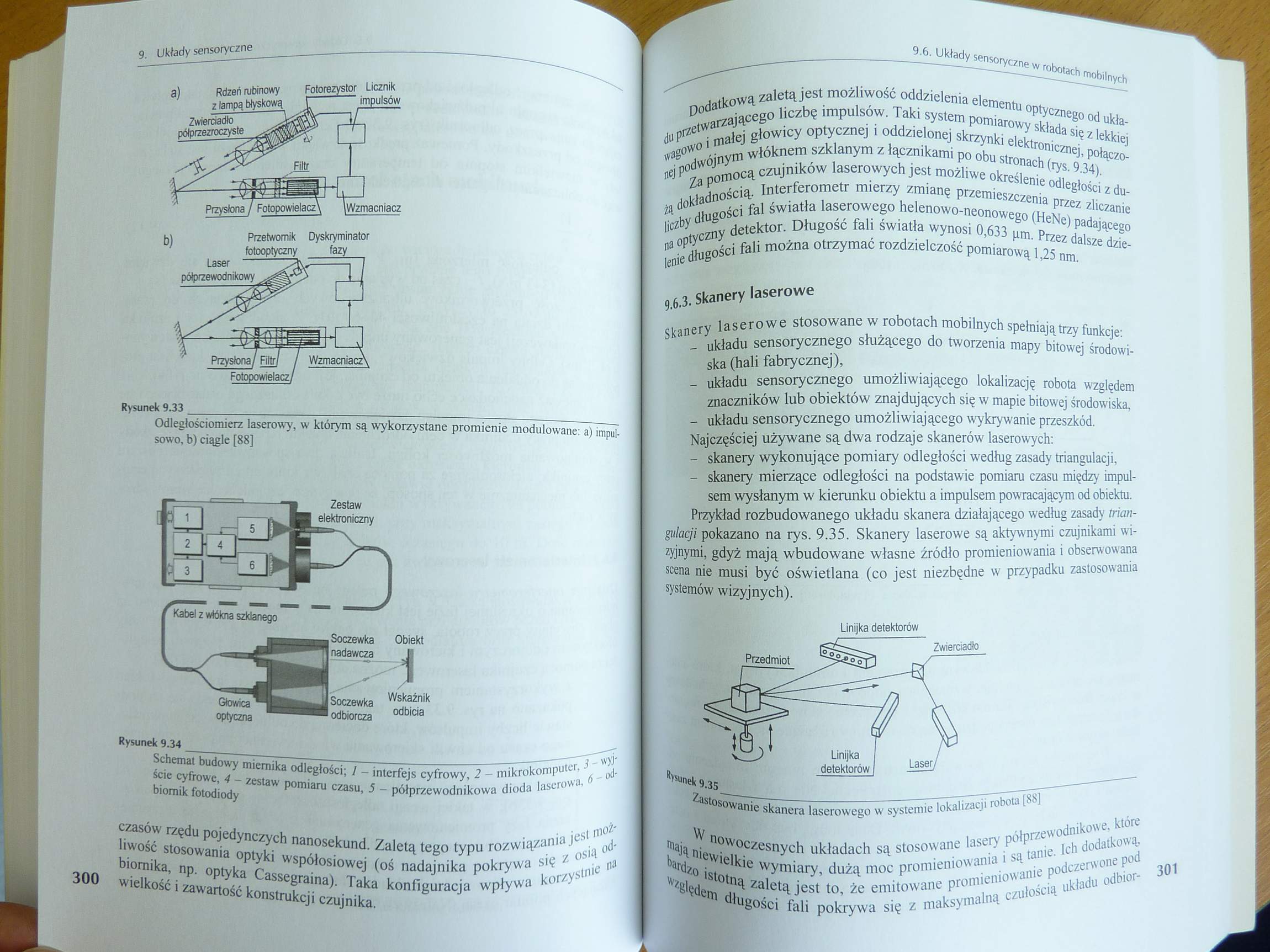
Odległościomierz laserowy, w którym są wykorzystane promienie modulowane: a) impulsowo, b) ciągle [88]
Rysunek 9 __
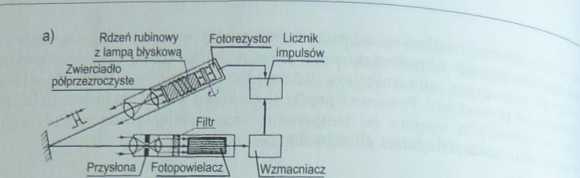
Schemat budowy miernika odległości; 1 — interfejs cyfrowy, 2 — mikrokomputer, i - "'W' ście cyfrowe, 4 — zestaw pomiaru czasu, 5 — półprzewodnikowa dioda laserowa, 6 - o®* biomik fotodiody
czasów rzędu pojedynczych nanosekund. Zaletą tego typu rozwiązania jest możliwość stosowania optyki współosiowej (oś nadajnika pokrywa się z osią odbiornika, np. optyka Cassegraina). Taka konfiguracja wpływa korzystnie n> 300 wielkość i zawartość konstrukcji czujnika.
Dodatkową zaletą jest możliwość oddzielenia elementu optycznego od układu przetwarzającego liczbę impulsów. Taki system pomiarowy składa się z lekkiej wagowo i małej głowicy optycznej i oddzielonej skrzynki elektronicznej, połączonej podwójnym włóknem szklanym z łącznikami po obu stronach (rys. 9.34).
Za pomocą czujników laserowych jest możliwe określenie odległości z dużą dokładnością. Interferometr mierzy zmianę przemieszczenia przez zliczanie liczby długości fal światła laserowego helenowo-neonowego (HeNe) padającego na optyczny detektor. Długość fali światła wynosi 0,633 pm. Przez dalsze dzielenie długości fali można otrzymać rozdzielczość pomiarową 1,25 nm.
9.6.3. Skanery laserowe
Skanery laserowe stosowane w robotach mobilnych spełniają trzy funkcje:
- układu|seńsorycznego służącego do tworzenia mapy bitowej środowiska (hali fabrycznej),
- układu^ sensorycznego umożliwiającego lokalizację robota względem znaczników lub obiektów znajdujących się w mapie bitowej środowiska,
- układu sensorycznego umożliwiającego wykrywanie przeszkód.
Najczęściej używane są dwa rodzaje skanerów laserowych:
- skanery wykonujące pomiary odległości według zasady triangulacji,
- skanery mierzące odległości na podstawie pomiaru czasu między impulsem wysłanym w kierunku obiektu a impulsem powracającym od obiektu.
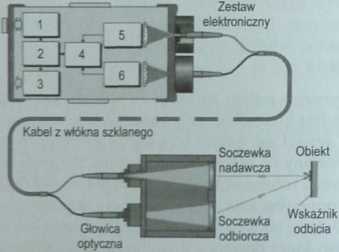
Przykład rozbudowanego układu skanera działającego według zasady trian-gulacji pokazano na rys. 9.35. Skanery laserowe są aktywnymi czujnikami wizyjnymi, gdyż mają wbudowane własne źródło promieniowania i obserwowana scena nie musi być oświetlana (co jest niezbędne w przypadku zastosowania systemów wizyjnych).
Linijka detektorów
RVainek 9.35^__
Zastosowanie skanera laserowego w systemie lokalizacji robota [88]
W nowoczesnych układach są stosowane lasery półprzewodnikowe, które niewielkie wymiary, dużą moc promieniowania i są tanie. Ich dodatkową ardzo istotną zaletą jest to, że emitowane promieniowanie podczerwone pod Wz8lędem długości fali pokrywa się z maksymalną czułością układu odbior-
Wyszukiwarka
Podobne podstrony:
P1080319 9. Układy sensoryczne 9.4.2. Przetworniki siły i naprężeń Wyposażenie chwytaka w przetworni
30031 P1080313 9. Układy sensoryczne Rysunek^__ Klasyfikacja stosowanych w robotach przemysłowych uk
48427 P1080320 9, Układy sensoryczne Rysunek 9.18___________ Budowa pneumatycznej „sztucznej skóry&q
40754 P1080323 9. Układy sensoryczne Rysunek 9.26 Łi/Ti v_ Schemat blokowy układu wizyjnego robotów
P1080324 9. Układy sensoryczne - odległości między charakterystycznymi punktami ob
67726 P1080325 9. Układy sensoryczne ruchu ramienia robota przy różnych jego ustawieniach. Kalibracj
więcej podobnych podstron