40754 P1080323
9. Układy sensoryczne
Rysunek 9.26 Łi/Ti v_
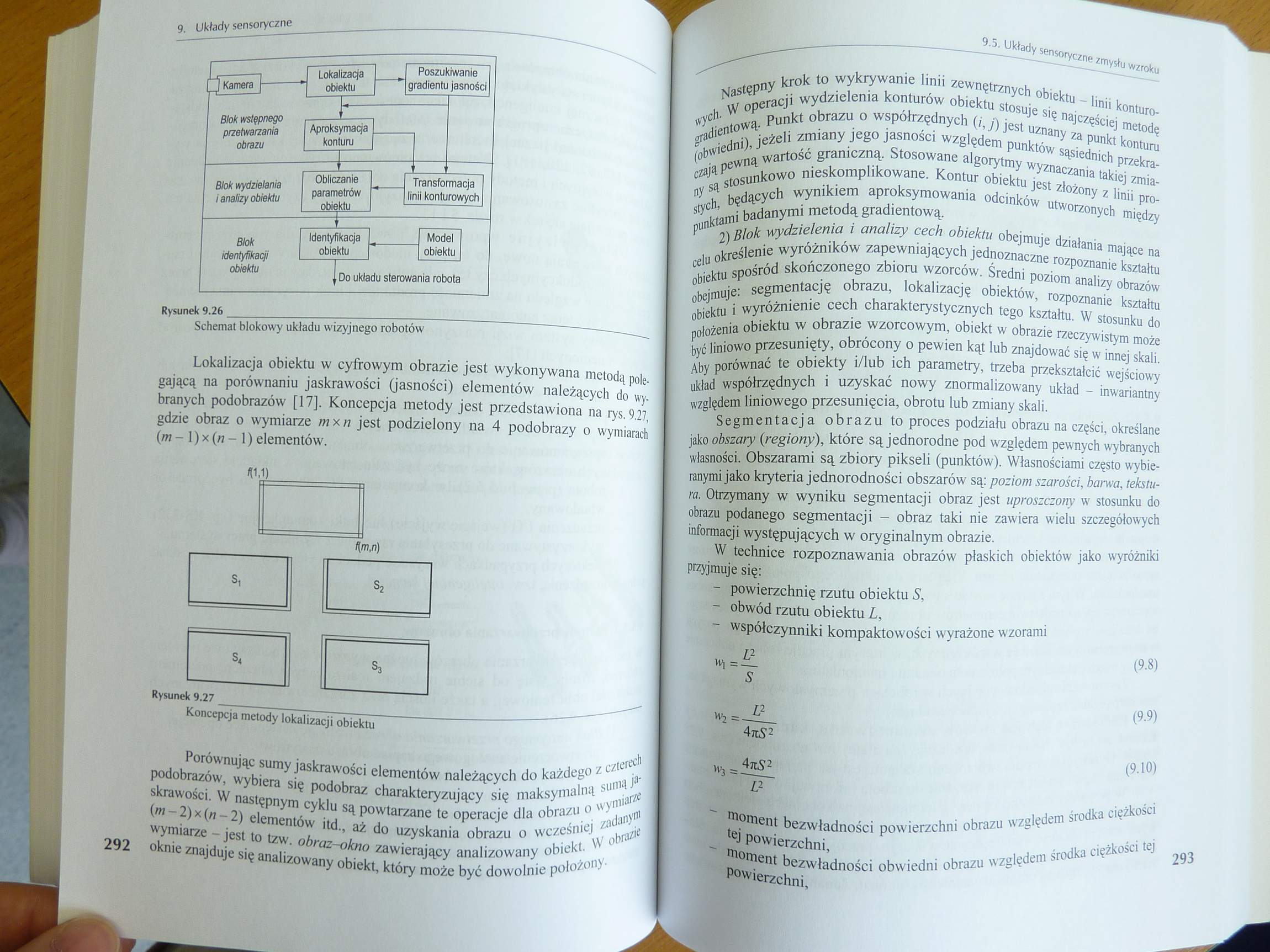
Schemat blokowy układu wizyjnego robotów
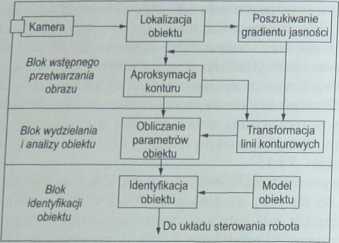
Lokalizacja obiektu w cyfrowym obrazie jest wykonywana metodą polegającą na porównaniu jaskrawości (jasności) elementów należących do wybranych podobrazów [17]. Koncepcja metody jest przedstawiona na rys. 9.27, gdzie obraz o wymiarze m x n jest podzielony na 4 podobrazy o wymiarach (w — l)x(/i—1) elementów.
*1.1)_
Ąm,n)
|
S, |
S2 | |
|
S4 |
S3 | |
Rysunek 9.^_____________
Koncepcja metody lokalizacji obiektu
Porównując sumy jaskrawości elementów należących do każdego z czterech podobrazów, wybiera się podobraz charakteryzujący się maksymalną sumą jaskrawości. W następnym cyklu są powtarzane te operacje dla obrazu o wymiarze (w — 2) x (/? - 2) elementów itd., aż do uzyskania obrazu o wcześniej zadanym wymiarze - jest to tzw. obraz-okno zawierający analizowany obiekt. W obrazie oknie znajduje się analizowany obiekt, który może być dowolnie położony.
Następny krok to wykrywanie linii zewnętrznych obiektu - linii konturowych. W operacji wydzielenia konturów obiektu stosuje się najczęściej metodę gradientową. Punkt obrazu o współrzędnych (/, yj jest uznany za punkt konturu (obwiedni), jeżeli zmiany jego jasności względem punktów sąsiednich przekraczają pewną wartość graniczną. Stosowane algorytmy wyznaczania takiej zmiany są stosunkowo nieskomplikowane. Kontur obiektu jest złożony z linii prostych, będących wynikiem aproksymowania odcinków utworzonych między punktami badanymi metodą gradientową.
2) Blok wydzielenia i analizy cech obiektu obejmuje działania mające na celu określenie wyróżników zapewniających jednoznaczne rozpoznanie kształtu obiektu spośród skończonego zbioru wzorców. Średni poziom analizy obrazów obejmuje: segmentację obrazu, lokalizację obiektów, rozpoznanie kształtu obiektu i wyróżnienie cech charakterystycznych tego kształtu. W stosunku do położenia obiektu w obrazie wzorcowym, obiekt w obrazie rzeczywistym może być liniowo przesunięty, obrócony o pewien kąt lub znajdować się w innej skali. Aby porównać te obiekty i/lub ich parametry, trzeba przekształcić wejściowy układ współrzędnych i uzyskać nowy znormalizowany układ - inwariantny względem liniowego przesunięcia, obrotu lub zmiany skali.
Segmentacja obrazu to proces podziału obrazu na części, określane jako obszary (regiony), które są jednorodne pod względem pewnych wybranych własności. Obszarami są zbiory pikseli (punktów). Własnościami często wybieranymi jako kryteria jednorodności obszarów są: poziom szarości, barwa, tekstura. Otrzymany w wyniku segmentacji obraz jest uproszczony w stosunku do obrazu podanego segmentacji — obraz taki nie zawiera wielu szczegółowych informacji występujących w oryginalnym obrazie.
W technice rozpoznawania obrazów płaskich obiektów jako wyróżniki przyjmuje się:
- powierzchnię rzutu obiektu S,
- obwód rzutu obiektu L,
- współczynniki kompaktowości wyrażone wzorami
L2
=— (9.8)
(9.9)
n
Wh —-
4tlS2
AnS2
I?
(9.10)
- moment bezwładności powierzchni obrazu względem środka ciężkości tej powierzchni,
~ moment bezwładności obwiedni obrazu względem środka ciężkości tej *:śpOwierzchni, - '
Wyszukiwarka
Podobne podstrony:
HPIM0857 7. Układy stfosoiyc/ne Schemat blokowy układu wizyjnego robotów Rysunek 7.23 Ąmji) Rysunek
30031 P1080313 9. Układy sensoryczne Rysunek^__ Klasyfikacja stosowanych w robotach przemysłowych uk
48427 P1080320 9, Układy sensoryczne Rysunek 9.18___________ Budowa pneumatycznej „sztucznej skóry&q
297 (17) 296 Rozdział 5. Układy regulacji impulsowej Rys. 5.49. Zastępczy schemat blokowy układu z r
P1080327 9. Układy sensoryczne b) Przetwornik Dyskryminator fotooptyczny fezy Rysu
P1080319 9. Układy sensoryczne 9.4.2. Przetworniki siły i naprężeń Wyposażenie chwytaka w przetworni
P1080324 9. Układy sensoryczne - odległości między charakterystycznymi punktami ob
67726 P1080325 9. Układy sensoryczne ruchu ramienia robota przy różnych jego ustawieniach. Kalibracj
więcej podobnych podstron