P1080318
9. Układy sensoryczne
biegunów dodatkowych. W warunkach ustalonych, przy niezmiennym strun,-niu magnetycznym wzbudzenia, napięcie prądnicy tachometrycznej jest prop^ cjonalne do prędkości obrotowej
U—Kprn
gdzie Kpr - współczynnik wzmocnienia — proporcjonalności między napięciem a prędkością obrotową.
Wadą prądnic tachometrycznych prądu stałego jest obecność styków ślizgo-wych, co powoduje zmniejszenie niezawodności, pulsacje napięcia wyjściowego (w szczególności przy małych prędkościach), iskrzenie i zakłócenia radioelek-tryczne. Wartość błędu prądnicy tachometrycznej prądu stałego przy maksymalną I prędkości nie przewyższa kilku procent, a współczynnik wzmocnienia Kpr wynosi I Kyj- 10* 100 m ■ V/obr/min.
Zalety prądnic tachometrycznych prądu stałego polegają na braku błędów fazowych, wysokiej liniowości i stromości charakterystyk wyjściowych, braki | potrzeby doprowadzenia napięcia wzbudzenia w prądnicach tachometrycznych prądu stałego z magnesami trwałymi, niewystępowaniu siły elektromotorycznej przy nieruchomym twomiku.
9.4. Układy sensoryczne dotyku
W robotach współczesnych generacji typowe zadania układów sensorycznych; zastępu jących zmysł dotyku są związane z:
1) pomiarami i sterowaniem parametrami:
- chwytania, w przypadku wykonywania przez robota zadań transportowych,
- obróbki, w przypadku wykonywania przez robota zadań technologicznych,
2) rozpoznawania obiektu manipulacji, w tym:
- wykrywania obecności obiektu manipulacji,
- rozpoznawania położenia i zorientowania obiektu manipulacji,
3) pomiarami umiejscowienia obiektu manipulacji,
4) zabezpieczeniem chwytaków przed kolibą.
W celu zrealizowania tych zadań są stosowane następujące ro j-czujników dotyku:
- czujniki stykowe,
- przetworniki siły i naprężeń,
- przetworniki dotykowe typu „ sztuczna skóra ".
9.4.1. Czujniki stykowe
Czujniki stykowe, będące dzisiaj najpowszechniejszym wyposażeniem służą do zbierania informacji o środowisku zewnętrznym. Najprostszymi ^ 282 kami stykowymi są łączniki stykowe (drogowe), które mają dwa położeni
cze styków: rozwarte i zwarte. Łączniki te generują sygnał elektryczny (najczęściej) lub hydrauliczny czy mechaniczny w wyniku przesunięcia się względem „jego kołka, zderzaka lub magnesu trwałego.
Współcześnie w czujniki stykowe są wyposażone przede wszystkim chwytaki robotów; dzięki nim, między innymi, można:
- zabezpieczyć chwytak przed kolizją,
- wykrywać obecność przedmiotu w chwytaku i na stanowisku składowania,
- wyszukiwać wolne miejsce na stanowisku składowania.
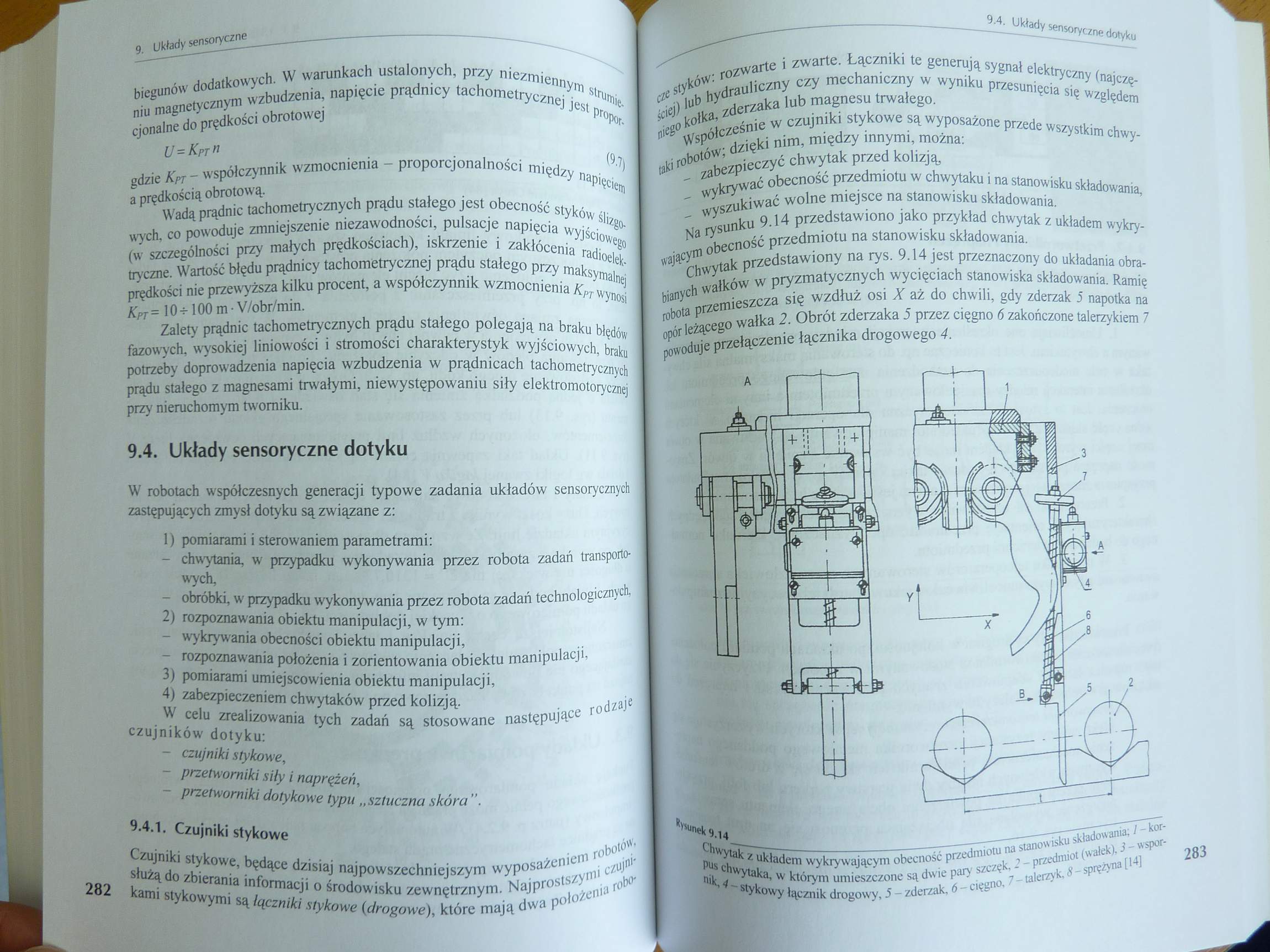
Na rysunku 9.14 przedstawiono jako przykład chwytak z układem wykrywającym obecność przedmiotu na stanowisku składowania.
Chwytak przedstawiony na rys. 9.14 jest przeznaczony do układania obrabianych wałków w pryzmatycznych wycięciach stanowiska składowania. Ramię robota przemieszcza się wzdłuż osi X aż do chwili, gdy zderzak 5 napotka na opór leżącego wałka 2. Obrót zderzaka 5 przez cięgno 6 zakończone talerzykiem 7 powoduje przełączenie łącznika drogowego 4.

pus chwytaka, w którym umieszczone są dwie pary szczęk, 2 - przedmiot (wałek), 3 - wspornik, 4 -.stykowy łącznik drogowy, 5 - zderzak, 6 - cięgno, 7 - talerzyk, 8 - sprężyna [14] 283
Wyszukiwarka
Podobne podstrony:
67726 P1080325 9. Układy sensoryczne ruchu ramienia robota przy różnych jego ustawieniach. Kalibracj
P1080319 9. Układy sensoryczne 9.4.2. Przetworniki siły i naprężeń Wyposażenie chwytaka w przetworni
P1080324 9. Układy sensoryczne - odległości między charakterystycznymi punktami ob
więcej podobnych podstron