P1080335
10. Sztuczna inteligencja w robotyce
dostarczane przez dobrze nauczone sieci są dokładniejsze niż wyniki uzyskane z wykorzystaniem metod modelowania.
W drugim przypadku sieci neuronowe służą do rozpoznawania informacji pochodzących z systemów wizyjnych, np. do rozpoznawania kształtów lub identyfikowania położenia przedmiotów. Sieci neuronowe w takich zastosowaniach I zastępują tradycyjne metody analityczne, stosowane na poziomie struktury układu sterującego.
10.3.2. Sterowanie ruchem robota
Rozważony będzie przykład sterowania ruchem dwóch członów wykonawczych! robota przegubowego, opartego na zasadach działania układów biologicznych) i wykorzystującego warstwowe sieci neuronowe. Zadaniem układu będzie kompensacja błędów trajektorii ruchu, które mogą być spowodowane wpływem warunków rzeczywistych, przez „nauczenie się” niezbędnych poprawek, określonych różnicami [76]
A^i = <f>\- <t\ oraz Af2 =jpp <f'i (10.3)1
gdzie: f\, fa - rzeczywiste wartości przemieszczeń kątowych odpowiednio dla, pierwszej i drugiej pary kinematycznej, <f)\, i$| - teoretycznie obliczone wartości przemieszczeń.
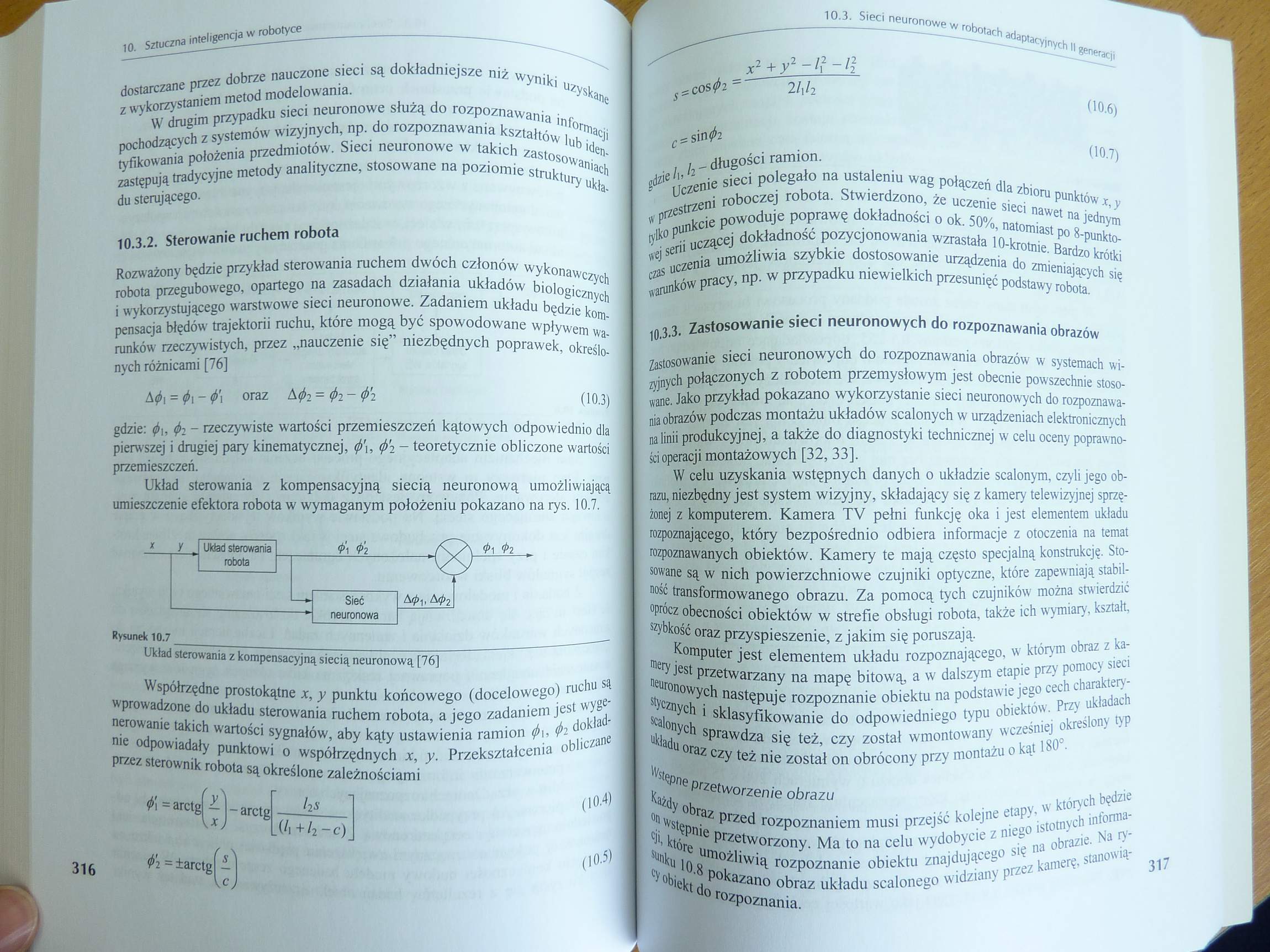
Układ sterowania z kompensacyjną siecią neuronową umożliwiając^ umieszczenie efektora robota w wymaganym położeniu pokazano na rys. 10.7. ,
* y Układ sterowania robota
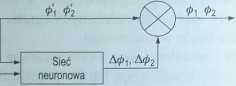
Rysunek ' ' _
Układ sterowania z kompensacyjną siecią neuronową [76]
Współrzędne prostokątne x, y punktu końcowego (docelowego) mchu są wprowadzone do układu sterowania mchem robota, a jego zadaniem jest wyge-j nerowanie takich wartości sygnałów, aby kąty ustawienia ramion (f>\, dokładjJ nie odpowiadały punktowi o współrzędnych x, y. Przekształcenia obliczanej przez sterownik robota są określone zależnościami
H =arctd
arctg
S + h~ć)
(10.4)
(lOĄ
fl = ±arctg
Bk* X2 + V2 -1} — /f
SsCOS^2=--T77- (10.6)
Z/j/2
c=sin^2 (10.7)
gdzie /|, k- długości ramion.
Uczenie sieci polegało na ustaleniu wag połączeń dla zbioru punktów x, y w przestrzeni roboczej robota. Stwierdzono, że uczenie sieci nawet na jednym lyjjco punkcie powoduje poprawę dokładności o ok. 50%, natomiast po 8-punkto-wej serii uczącej dokładność pozycjonowania wzrastała 10-krotnie. Bardzo krótki czas uczenia umożliwia szybkie dostosowanie urządzenia do zmieniających się warunków pracy, np. w przypadku niewielkich przesunięć podstawy robota.
10.3.3. Zastosowanie sieci neuronowych do rozpoznawania obrazów
Zastosowanie sieci neuronowych do rozpoznawania obrazów w systemach wizyjnych połączonych z robotem przemysłowym jest obecnie powszechnie stosowane. Jako przykład pokazano wykorzystanie sieci neuronowych do rozpoznawania obrazów podczas montażu układów scalonych w urządzeniach elektronicznych na linii produkcyjnej, a także do diagnostyki technicznej w celu oceny poprawności operacji montażowych [32,33].
W celu uzyskania wstępnych danych o układzie scalonym, czyli jego obrazu, niezbędny jest system wizyjny, składający się z kamery telewizyjnej sprzężonej z komputerem. Kamera TV pełni funkcję oka i jest elementem układu rozpoznającego, który bezpośrednio odbiera informacje z otoczenia na temat rozpoznawanych obiektów. Kamery te mają często specjalną konstrukcję. Stosowane są w nich powierzchniowe czujniki optyczne, które zapewniają stabilność transformowanego obrazu. Za pomocą tych czujników można stwierdzić oprócz obecności obiektów w strefie obsługi robota, także ich wymiary, kształt, szybkość oraz-przyspieszenie, z jakim się poruszają.
Komputer jest elementem układu rozpoznającego, w którym obraz z kamery jest przetwarzany na mapę bitową, a w dalszym etapie przy pomocy sieci neuronowych następuje rozpoznanie obiektu na podstawie jego cech charakterystycznych i sklasyfikowanie do odpowiedniego typu obiektów. Przy układach scalonych sprawdza się też, czy został wmontowany wcześniej określony typ układu oraz czy też nie został on obrócony przy montażu o kąt 180°.
Wstępne przetworzenie obrazu
Każdy obraz przed rozpoznaniem musi przejść kolejne etapy, w których będzie °n wstępnie przetworzony. Ma to na celu wydobycie z niego istotnych informa-% które umożliwią, rozpoznanie obiektu znajdującego się na obrazie. Na ry-Sunku 10.8 pokazano obraz układu scalonego widziany przez kamerę, stanowią-^ obiekt do rozpoznania.
317
Wyszukiwarka
Podobne podstrony:
P1080342 (2) 10. Sztuczna inteligencja w robotyce jest realizowanych jako sztuczne sieci neuronowe.
P1080334 10. Sztuczna inteligencja w robotyce Zmodyfikowana waga 00.2) W procesie samouczenia, opisa
74879 P1080341 10. Sztuczna inteligencja w robotyce 10. Sztuczna inteligencja w robotyce Nowe wagi k
więcej podobnych podstron