str146
P (i)M
(9.158)
gdzlo U(l) |nsl funkcjq zawodności postaci
(9.159)
U(l)= /) I /,'(/).
Rozpatrywany proces transmisji różnicowej GPS wyróżnia występowanie dwóch wartości prawdopodobieństwa znajdowania się systemu w stanie zdatności. Owe prawdopodobieństwa iklalimlone są do przedziałów A, i A2. Stąd dla obu rozważanych przedziałów czasowych można wyznaczyć intensywności uszkodzeń oraz intensywności napraw jako
|
, _ 444)4 + A,) A, 4) |
, dla |
(9.160) | |
|
, dla |
'<4* A) |
(9.161) | |
|
A,-[1-4)1 | |||
|
, 444)4 + A,) 2_ V4) |
, dla |
1 e [** +A,,A2) |
(9.163) |
|
0-4)1-0-41-4+a,)1 |
, dla |
/e[/,+A„A2) , |
(9.164) |
|
A, [1-4)1 |
gdzlo:
K i , p, Intensywność uszkodzeń oraz napraw dla t e \tk, A,) ,
(,, p . - Intensywność uszkodzeń oraz napraw dla t e + A,,A2) .
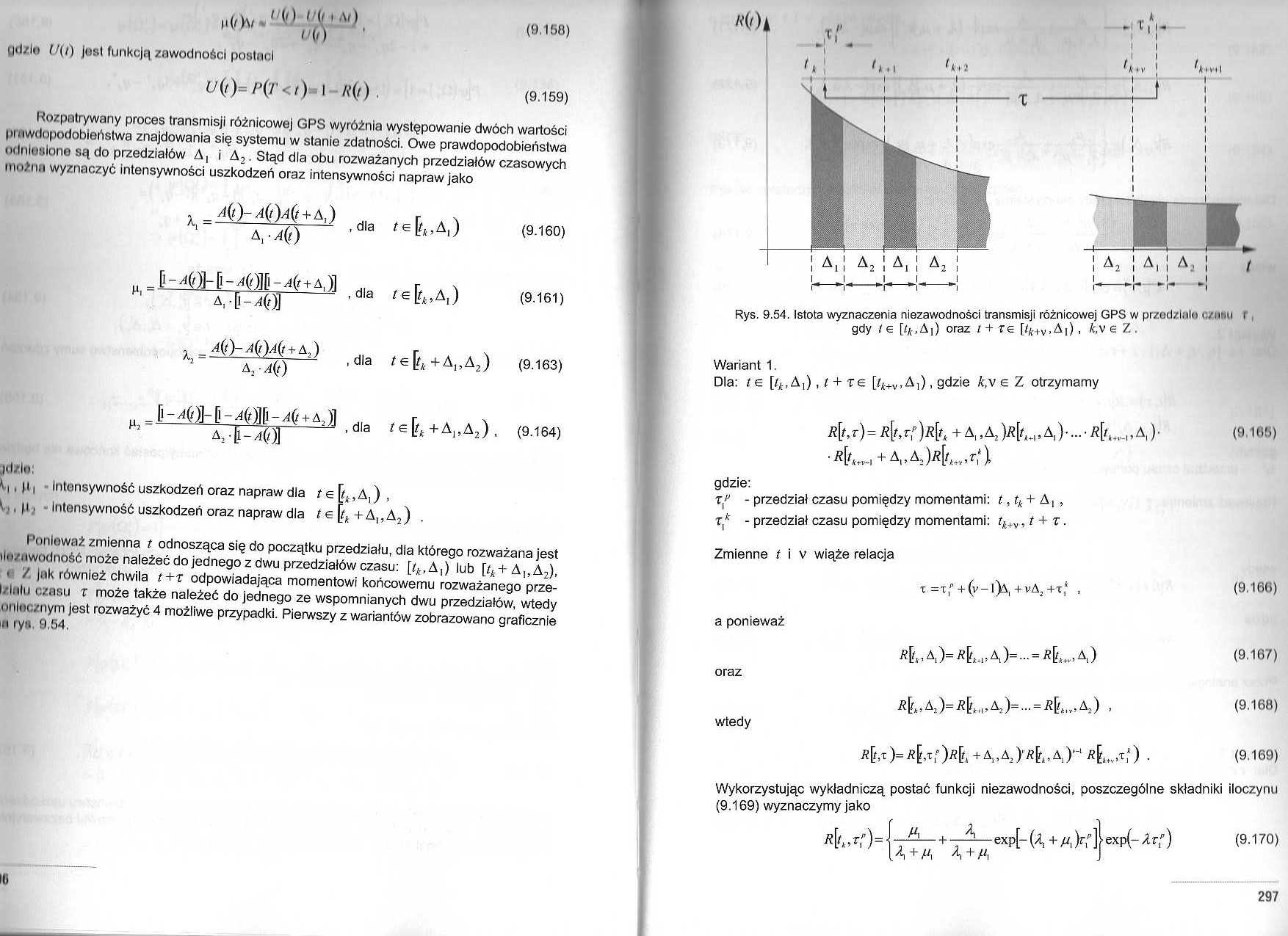
I •onleważ zmienna t odnosząca się do początku przedziału, dla którego rozważana jest ili'.'iiwodność może należeć do jednego z dwu przedziałów czasu: [i*, A,) lub [ti.+ A1,A2), • / jak również chwila t+t odpowiadająca momentowi końcowemu rozważanego prze-Izlnlii r./nsu X może także należeć do jednego ze wspomnianych dwu przedziałów, wtedy i mlnc/nym jest rozważyć 4 możliwe przypadki. Pierwszy z wariantów zobrazowano graficznie a lya. 9,54.
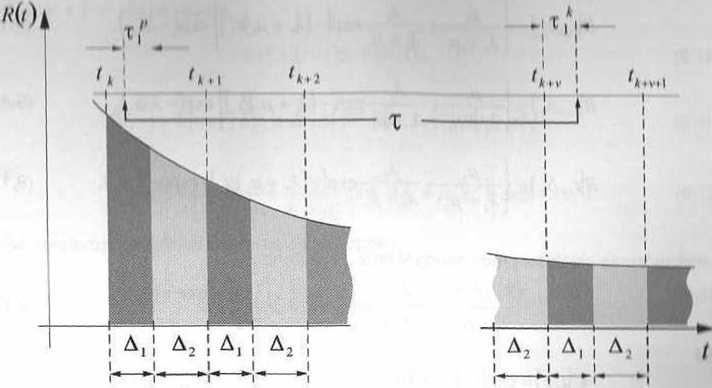
Rys. 9.54. Istota wyznaczenia niezawodności transmisji różnicowej GPS w przedziału < .mmi i gdy te [t*.A,) oraz /+re f/ft+y.Aj) . k,\ e Z.
Wariant 1.
Dla: t e [/*, A,), t + Te [f*+v, A,), gdzie k,v e Z otrzymamy
r) = Ą, r,')/?[/, + A, ,A2 , A, )•... • , A,) • (9.188)
•4»łv-1 + Al,A,)/?[^v,r‘)l
gdzie:
Tf - przedział czasu pomiędzy momentami: t, tk + A, , r k - przedział czasu pomiędzy momentami: tk+v ,t+ t .
|
Zmienne t i |
v wiąże relacja | |
|
X = T|" +(v-lX + vA2 +t‘ , |
(9.160) | |
|
a ponieważ | ||
|
oraz |
if[r(,A,)=/?L.Al)=...= /?[r*łv,A1) |
(9.167) |
|
wtedy |
i?[ri)AJ)=/?[rt,„A!)=... = 4i,,.;A2) . |
(9.168) |
|
)= ■ )Ą, + A,,Aj >74, A,)- 4„,x‘) . |
(9.169) |
Wykorzystując wykładniczą postać funkcji niezawodności, poszczególne składniki iloczynu (9.169) wyznaczymy jako
4
Z, +yv.
exp[- (4 + //>,'

(9.170)
297
Wyszukiwarka
Podobne podstrony:
Zaprawa więzienna (124) i«» nu • - 1 ■ » 11 a * »* m ______r* ” *~**‘* bard^irj f
18063 synchrony007 i ■n jnrtviiliHrlfJ f il iliiiih,ii iii ti a m mu nu u ni.................. -Ć u
r*—»atych- i Pheczc. do «cn> ujn*U z komu ty perm. Dorot*, cork. wtafcfcfala N.e byle MU nu* by*
DSC00017 Nedtug Paul CoWmiau* ^ W1 opricz wymagać msza obemue takie to, lak organizm FUNKCJONUJ
mim mnuwmu imam mru/uA / //// aut autami ma nut mu utuuat WnlĘim, //// umumiuu/iai mu aut mu mu
DSC09408 (4) xuv HlOOlUfU TOŁACtA 1■■■ W ton sposób dusbloo^ć ipolcczjm
o zapoznanie się zasadami funkcjonowania zawodników w sekcji warunki funkcjonowania zawodników w klu
samo punktów (np klasa 1 - Ipkt, klasa 2 - pkt. itp.). Im lepsze możliwości funkcjonalne zawodnika t
M031 (2.54) mu nu przedłużeniu osi głównej śruby nap iłowej (rys. 2.24). Moc silnika wynosi 8 do 11&
DSC00327 .15. Dla częstotliwości 150 muz Knoci Koncentryczny mu nu-micnnaM 0.02 cill/m. Dla częstotl
travel�40 u u mu u u •i n nm ii u lim mu nu u ii nm ” •
synchrony007 i ■n jnrtviiliHrlfJ f il iliiiih,ii iii ti a m mu nu u ni.................. -Ć u — ^?jS
DSCN2633 Funkcje Funkcja jest to podprogram - fragmen proD^mu grupujący instrukcje.flBK555g pomocą
więcej podobnych podstron