Untitled Scanned 17 (9)
a następnie sprawdzamy dwa dalsze warunki:
£ X= +417-417=0;
£ Y= +1910 + 3090-2000-3000=0.
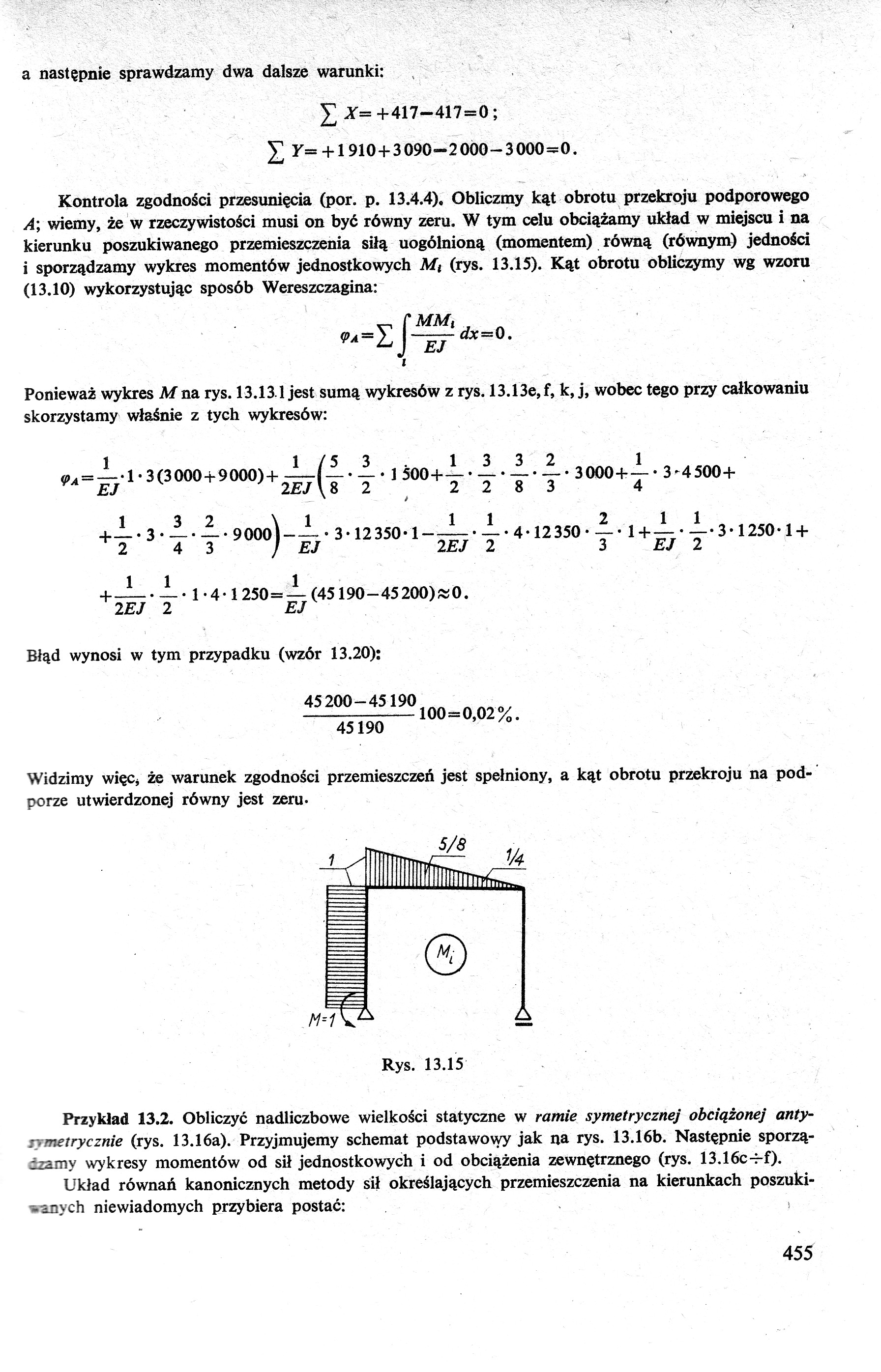
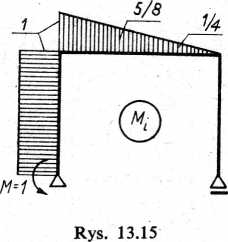
Kontrola zgodności przesunięcia (por. p. 13.4.4). Obliczmy kąt obrotu przekroju podporowego A; wiemy, że w rzeczywistości musi on być równy zeru. W tym celu obciążamy układ w miejscu i na kierunku poszukiwanego przemieszczenia siłą uogólnioną (momentem) równą (równym) jedności i sporządzamy wykres momentów jednostkowych Mt (rys. 13.15). Kąt obrotu obliczymy wg wzoru (13.10) wykorzystując sposób Wereszczagina:
„ r mm t 1
Ponieważ wykres M na rys. 13.13 1 jest sumą wykresów z rys. 13.13e,f, k, j, wobec tego przy całkowaniu skorzystamy właśnie z tych wykresów:
,. = l.l-3(3000 + 9000) + 2-l7({
1 500+
9000
1
3
T
i
3000 + —- 3-4500+ 4
3-12350-1 —
EJ 2 EJ 2
2 1 1
4-12350--- 1+----3-1250-1 +
3 EJ 2
+-i-•-i-• 1 ■ 4 • 1 250 = — (45190 - 45 200) » 0. 2EJ 2 EJ
Błąd wynosi w tym przypadku (wzór 13.20):
100 = 0,02%.
45200-45190
45190
Widzimy więc, że warunek zgodności przemieszczeń jest spełniony, a kąt obrotu przekroju na podporze utwierdzonej równy jest zeru-
Przykład 13.2. Obliczyć nadliczbowe wielkości statyczne w ramie symetrycznej obciążonej anty-lymetrycznie (rys. 13.16a). Przyjmujemy schemat podstawowy jak na rys. 13.16b. Następnie sporządzamy wykresy momentów od sił jednostkowych i od obciążenia zewnętrznego (rys. 13.16c+f).
Układ równań kanonicznych metody sił określających przemieszczenia na kierunkach poszukiwanych niewiadomych przybiera postać:
455
Wyszukiwarka
Podobne podstrony:
22074 Untitled Scanned 17 (8) 115. Tui e r d z cnie. Dla każdego n e C+ zachodzi równość l1 + 2 + 3
HPIM4376 18 Anders Gmumsatt, Elżbieta Zakrzeurtka-Manterys Dwa następne przykłady Dwa dalsze przykła
Untitled Scanned 17 V ^ L i jA*/f h *» &Or<bf7 0 1 * 0Ć^0. n r c *• ‘
Untitled Scanned 17 54 (1) r -* [(r —* p A r) —* [q V r -> (p a q) v (p a r)]] 2 :: (1)=>31 &l
Untitled Scanned 17 PókAnyag ■9i 1 nagy geszeenye & 6 fogpiszkdló w Vekony fonal * Rag
Untitled Scanned 17 (\1) (IŻJ) WLlWk Q(& IaJ L hl Hf Oj!) C-
70900 Untitled Scanned 17 (10) Zestaw II Rozkładanie i składanie jajek, bab z uwzględnieniem wielkoś
Untitled Scanned 17 (2) lekkiego na każdą warstwę, energią Ez = 0,58 MJm3 (metoda 11 badań według [8
Untitled Scanned 17 I I ^(97V ,LlC iyO^ Va >L±Aj/hIa^O^i jjj..i tO byt O &
Untitled Scanned 17 (10) Zestaw II Rozkładanie i składanie jajek, bab z uwzględnieniem wielkości prz
Untitled Scanned 17 (11) Wskazówki dla nauczycieliA 4 w. 70 Wyrazy do odgadnięcia: chleb, charakter,
Untitled Scanned 17 (4) 126 Średniowieczna piesn religijna polska Wiecznej chwały domieści: Panna Bo
więcej podobnych podstron