Untitled Scanned 36
- 72 -
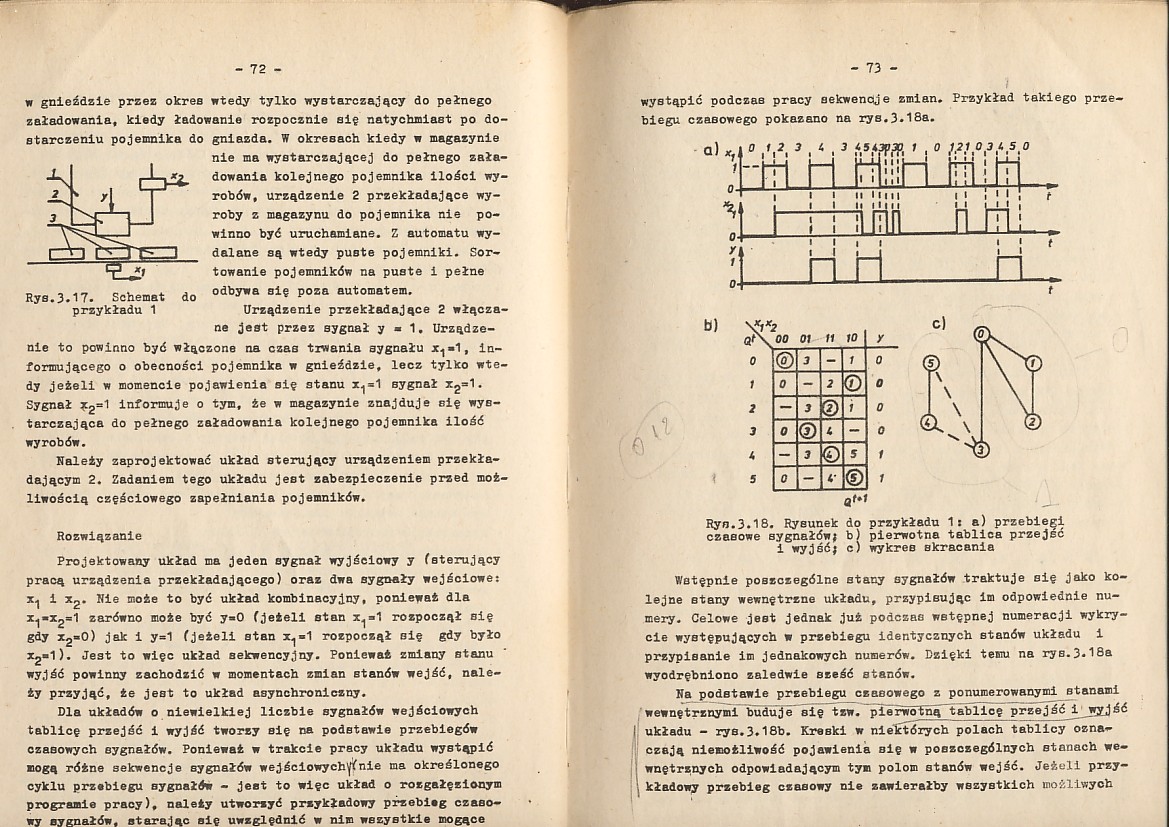
w gnieździe przez okres wtedy tylko wystarczający do pełnego załadowania, kiedy ładowanie rozpocznie się natychmiast po dostarczeniu pojemnika do gniazda. W okresach kiedy w magazynie
nie ma wystarczającej do pełnego załadowania kolejnego pojemnika ilości wyrobów, urządzenie 2 przekładające wyroby z magazynu do pojemnika nie powinno być uruchamiane. Z automatu wydalane są wtedy puste pojemniki. Sortowanie pojemników na puste i pełne odbywa się poza automatem.
Urządzenie przekładające 2 włączane jest przez sygnał y - 1, Urządzenie to powinno byó włączone na czas trwania sygnału x-«1, informującego o obecności pojemnika w gnieździe, lecz tylko wtedy jeżeli w momencie pojawienia się stanu x^=1 sygnał x2=1• Sygnał *2=1 informuje o tym, że w magazynie znajduje się wystarczająca do pełnego załadowania kolejnego pojemnika ilość wyrobów.
Należy zaprojektować układ sterujący urządzeniem przekładającym 2. Zadaniem tego układu jest zabezpieczenie przed możliwością częściowego zapełniania pojemników.
Rozwiązanie
Projektowany układ ma jeden sygnał wyjściowy y (sterujący pracą urządzenia przekładającego) oraz dwa sygnały wejściowe: i x2. Nie może to być układ kombinacyj.ny, ponieważ dla x1-x2«1 zarówno może być y«0 (jeżeli stan r^-1 rozpoczął się gdy x2-0) jak i y«1 (jeżeli stan 3C^ —1 rozpoczął się gdy było x2«1). Jest to więc układ sekwencyjny. Ponieważ zmiany stanu wyjść powinny zachodzić w momentach zmian stanów wejść, należy przyjąć, że jest to układ asynchroniczny.
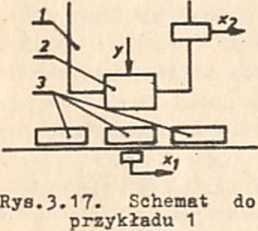
Dla układów o niewielkiej liczbie sygnałów wejściowych tablicę przejść i wyjść tworzy się na podstawie przebiegów czasowych sygnałów. Ponieważ w trakcie pracy układu wystąpić mogą różne sekwencje sygnałów wejściowychyfnie ma określonego cyklu przebiegu sygnałów - jeet to więc układ o rozgałęzionym programie pracy), należy utworzyć przykładowy przebieg czasowy sygnałów, starając się uwzględnić w nim wszystkie mogące
wystąpić podczas pracy sekwencje zmian. Przykład takiego przebiegu czasowego pokazano na rys.3.18a.

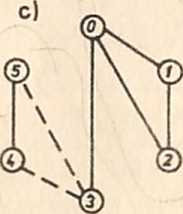
Rys.3.18. Rysunek do przykładu 1: a) przebiegi czasowe sygnałów* b) pierwotna tablica przejść i wyjść* c) wykres skracania
Wstępnie poszczególne stany sygnałów traktuje się jako kolejne stany wewnętrzne układu, przypisując im odpowiednie numery. Celowe jest jednak już podczas wstępnej numeracji wykrycie występujących w przebiegu identycznych stanów układu i przypisanie im jednakowych numerów. Dzięki temu na rys.3*18a wyodrębniono zaledwie sześć stanów.
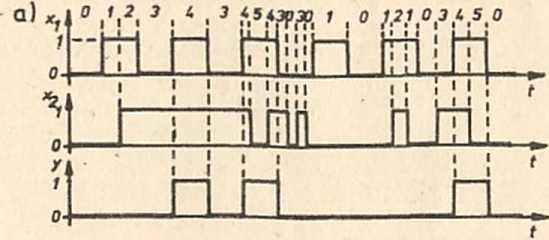
Ha podstawie przebiegu czasowego z ponumerowanymi stanami wewnętrznymi buduje się tzw. pierwotną tablicę przejść i wyjść
i układu - ry8.3.18b. Kreski w niektórych polach tablicy oznaczają niemożliwość pojawienia się w poszczególnych stanach wewnętrznych odpowiadającym tym polom stanów wejść. Jeżeli przykładowy przebieg czasowy nie zawierałby wszystkich możliwych
Wyszukiwarka
Podobne podstrony:
Untitled Scanned 31 95 podzielne przez. Występują one np. w następujących /.daniach: 2 jest mniejsze
Untitled Scanned 36 Ćwiczenia w pisaniu Redagowanie opowiadań ( iB 4.7 Przyjrzyj się uważnie obrazko
Untitled Scanned 36 oacmct fc mx et (Wnosi jojómc obdq wm€
Untitled Scanned 36 Tablica 4.9 Zestawienie wyników pomiarów zmiany wysokości próbki w czasie dla wy
Untitled Scanned 36 □ „Pinokio w poszukiwaniu pożywienia" „Biedny Pinokio pob
57201 Untitled Scanned 36 (4) PLANIMETRIA 39 itrego, tu ramię 247. R W trapez o polu 168 i ramiona
23373 Untitled Scanned 13 (6) 72 ŚREDNIOWIECZNA PIESN RELIGIJNA POLSKA Ukazał sie
85302 Untitled Scanned 69 (3) 72 STEREOME Zdający potrafi • uyznuc/nć pr/ckroji* phi-skio uirlnściun
więcej podobnych podstron