P1020151
(103)
Henryk Juszka
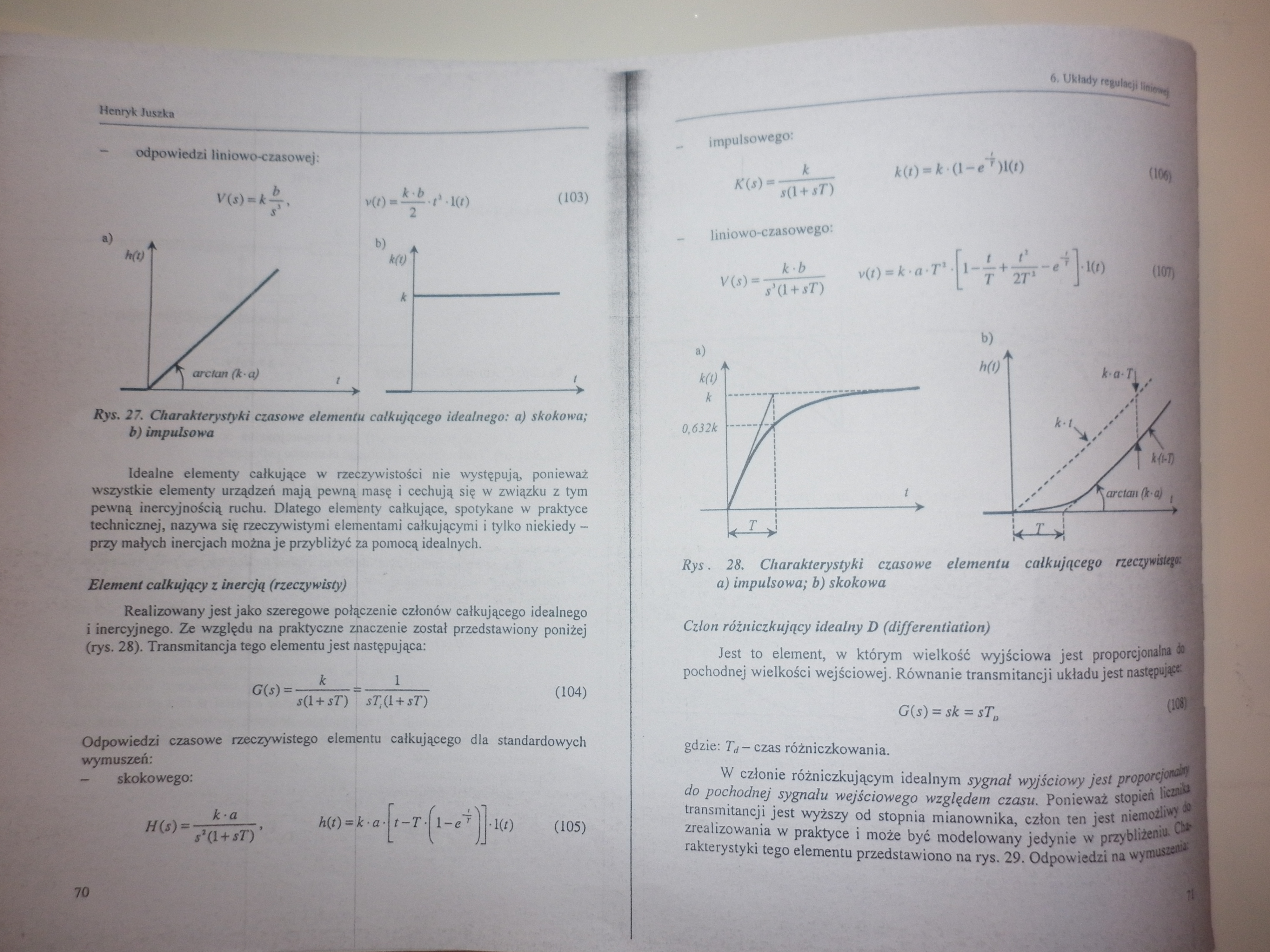
odpowiedzi liniowo-czasowej:
s
V(s) = k~,
hfl)
t
b)
k(t)
k
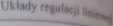
Rys. 27. Charakterystyki czasowe elementu całkującego idealnego: a) skokowa;
b) impulsowa
Idealne elementy całkujące w rzeczywistości nie występują, ponieważ wszystkie elementy urządzeń mają pewną masę i cechują się w związku z tym pewną inercyjnością ruchu. Dlatego elemjenty całkujące, spotykane w praktyce technicznej, nazywa się rzeczywistymi elementami całkującymi i tylko niekiedy -przy małych inercjach można je przybliżyć za pomocą idealnych.
Element całkujący z inercją (rzeczywisty)
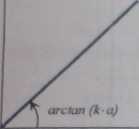
Realizowany jest jako szeregowe połączenie członów całkującego idealnego i inercyjnego. Ze względu na praktyczne znaczenie został przedstawiony poniżej (rys. 28). Transmitancja tego elementu jest następująca:
G(s) =
k
1
s(l+sr) ! j7)(1+jD
(104)
Odpowiedzi czasowe rzeczywistego elementu całkującego dla standardowych wymuszeń:
— skokowego:
impulsowego:
K,a). * - *(*) - * o - «** m oof|
s(l + sT)
liniowo-czasowego:
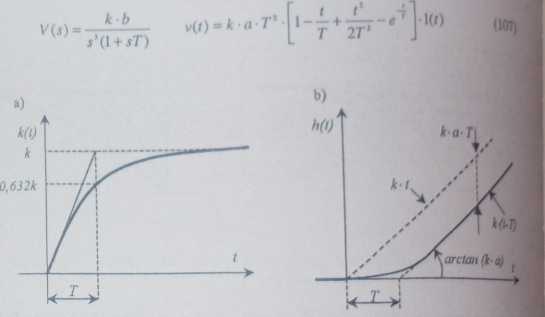
Rys. 28. Charakterystyki czasowe elementu całkującego rzeczywisty: a) impulsowa; b) skokowa
Człon różniczkujący idealny D (differentiation)
Jest to element, w którym wielkość wyjściowa jest proporcjonglH pochodnej wielkości wejściowej. Równanie transmitancji układu jest następują^
G(s) = sk = sTD (108,
gdzie: Ta - czas różniczkowania.
W członie różniczkującym idealnym sygnał wyjściowy jest proporcjoMiĘm do pochodnej sygnału wejściowego wzglądem czasu. Ponieważ stopień IkflH transmitancji jest wyższy od stopnia mianownika, człon ten jest niemożliwą! zrealizowania w praktyce i może być modelowany jedynie w przybliżeniaCffl rakterystyki tego elementu przedstawiono na rys. 29. Odpowiedzi na wymuszeni* 1
Wyszukiwarka
Podobne podstrony:
33457 P1020157 (137) Henryk hiszki Przykładem przedstawionego elementu jest czwóro i k t rys. 37. Tr
X ti — czas propagacji bramki EX NOR t2 — suma czasów propagacji inwerterów Rys. 8.27. Przebiegi
skanuj0017 (103) Tablica 2: Wartości orientacyjne liniowego współczynnika sprzężenia cieplnego (ciąg
img003 (94) *9* Wstęp W niemal każdym opracowaniu zmierzającym, w odpowiednim przedziale czasowym, d
skanuj0017 (103) Tablica 2: Wartości orientacyjne liniowego współczynnika sprzężenia cieplnego (ciąg
kép (103) luetiąe Tierehotivh6heANIEITUNG <&tcn MATERIAŁ io1 K»«»f«r»9{*n m
Moduł 1 Podstawy HTML Piotr Bubacz ITA-103 Aplikacje Internetowe Grupowanie liniowe i blokowe Znaczn
24 (104) przygotowanie pacjenta do badania Odpowiedni odstęp czasowy po leczeniu -
więcej podobnych podstron