P1080224
4. Wprowadzenie do kinematyki robotów
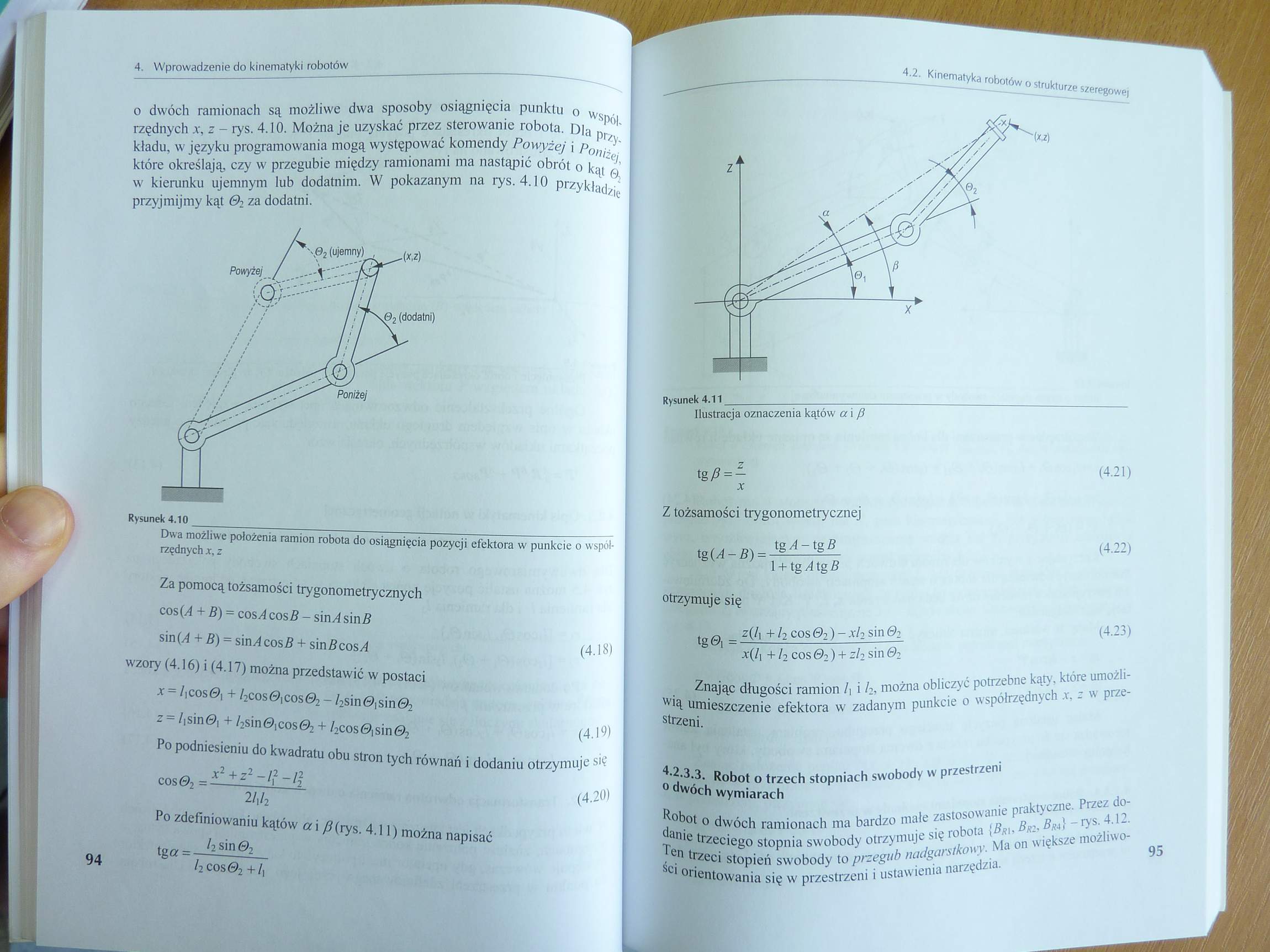
o dwóch ramionach są możliwe dwa sposoby osiągnięcia punktu o współ-1 rzędnych x, z- rys. 4.10. Można je uzyskać przez sterowanie robota. Dla przy-1 kładu, w języku programowania mogą występować komendy Powyżej i PoniżejM które określają, czy w przegubie między ramionami ma nastąpić obrót o kąt 6M w kierunku ujemnym lub dodatnim. W pokazanym na rys. 4.10 przykładzie I przyjmijmy kąt 02 za dodatni.
&2 (dodatni)
Rysunek _____ ■___
Dwa możliwe położenia ramion robota do osiągnięcia pozycji efektorai-W punkcie o współrzędnych z, z
Za pomocą tożsamości trygonometrycznych cos (,4 + B) = cosA cosjB - siki sinB
sin (A + B) = sin/4 cos B + sinficos./4 ■" _s;c; (4.18)
wzory (4.16) i (4.17) można przedstawić w postaci x=/icos0j + /2cos0|Cos02 - /2sin0isin02
z = /isin<9j + /2sin0|Cos02+ /2cos0isin02
Po podniesieniu do kwadratu obu stron tych równań i dodaniu otrzymuje się
(4.20)
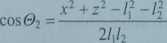
Po zdefiniowaniu kątów a i j| (rys. 4.11) można napisać h sin 02
94
(4.19)
/2 COS02 +1\
tgf = -x
(4.21)
> strukturę szeregowej
4.2. Kinematyka robotów o
Rysunek ___
Ilustracja oznaczenia kątów a i p
Z tożsamości trygonometrycznej
tg (A-B) =
tg A —tg B 1 + tgAtgB
(4.22)
otrzymuje się
tg 0i jg
z(li + h cos &2 ) ~ xh sin 02 x{l\ +/2 cos 02) +2/2 sin 02
(4.23)
Znając długości ramion l\ i /2, można obliczyć potrzebne kąty, które umożliwią umieszczenie efektora w zadanym punkcie o współrzędnych x, z w przestrzeni.
4.2.3.3. Robot o trzech stopniach swobody w przestrzeni o dwóch wymiarach
Robot o dwóch ramionach ma bardzo małe zastosowanie praktyczne. Przez dodanie trzeciego stopnia swobody otrzymuje się robota {BR1, BR2, Bm} - rys. 4.12. Ten trzeci stopień swobody to przegub nadgarstkowy. Ma on większe możliwości orientowania się w przestrzeni i ustawienia narzędzia.
Wyszukiwarka
Podobne podstrony:
P1080222 4. Wprowadzenie do kinematyki robotów dalej przykłady będą częściej dotyczyć tej konfigurac
72842 P1080233 4. Wprowadzenie do kinematyki robotów wtedy 4. Wprowadzenie do kinematyki robotów c &
więcej podobnych podstron