P1080331
10. Sztuczna inteligencja w robotyce
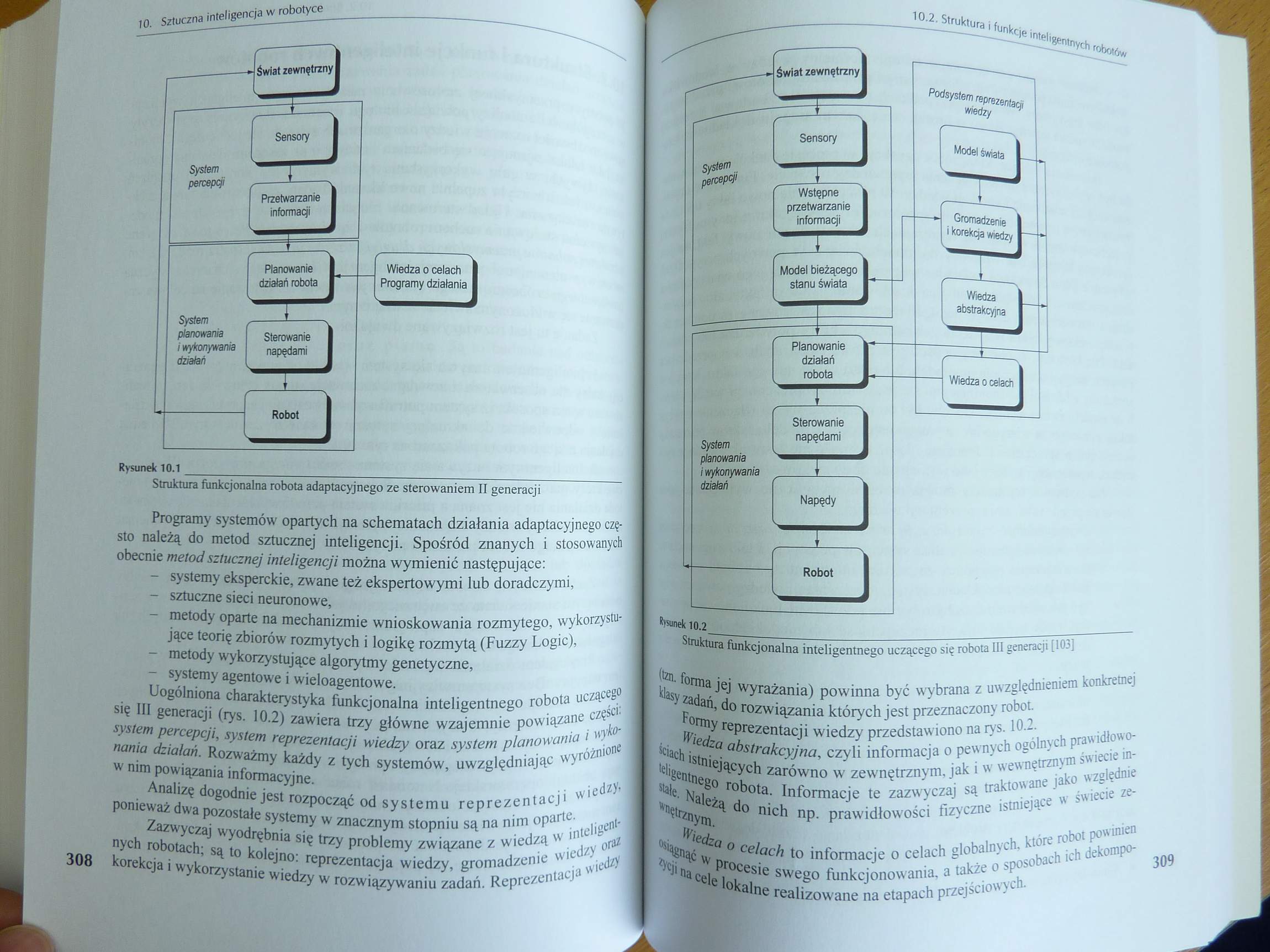
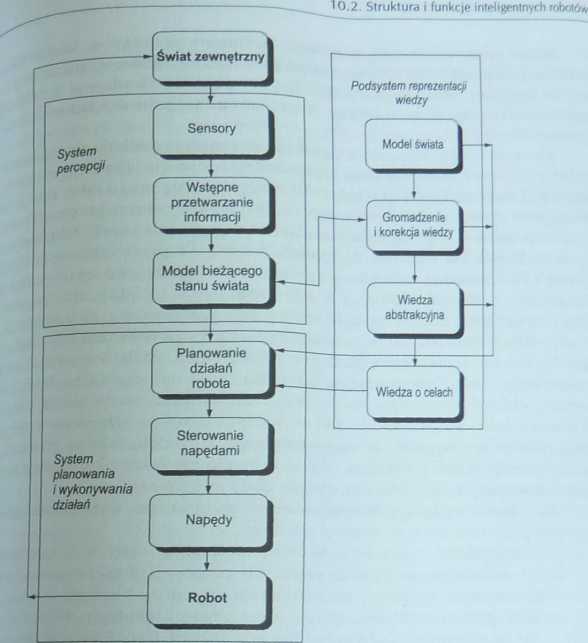
Rysunek 10.1 ____
Struktura funkcjonalna robota adaptacyjnego ze sterowaniem U generacji
Programy systemów opartych na schematach działania adaptacyjnego często należą do metod sztucznej inteligencji. Spośród znanych i stosowanych obecnie metod sztucznej inteligencji można wymienić następujące:
— systemy eksperckie, zwane też ekspertowymi lub doradczymi,
— sztuczne sieci neuronowe,
— metody oparte na mechanizmie wnioskowania rozmytego, wykorzystuj jące teorię zbiorów rozmytych i logikę rozmytą (Fuzzy Logic),
— metody wykorzystujące algorytmy genetyczne,
— systemy agentowe i wieloagentowe.
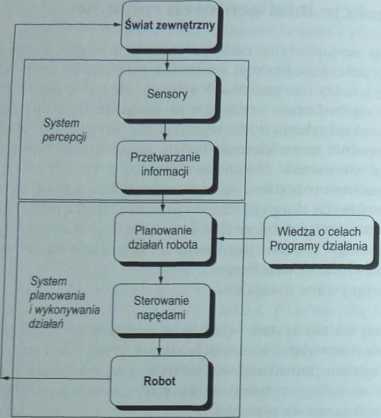
Uogólniona charakterystyka funkcjonalna inteligentnego robota uczącego, się III generacji (rys. 10.2) zawiera trzy główne wzajemnie powiązane części: system percepcji, system reprezentacji wiedzy oraz system planowania i wykonania działań. Rozważmy każdy z tych systemów, uwzględniając wyróżniona w nim powiązania informacyjne.
Analizę dogodnie jest rozpocząć od systemu reprezentacji wiedzy, ponieważ dwa pozostałe systemy w znacznym stopniu są na nim oparte.
Zazwyczaj wyodrębnia się trzy problemy związane z wiedzą w inteligentnych robotach; są to kolejno: reprezentacja wiedzy, gromadzenie wiedzy oraz 308 korekcja i wykorzystanie wiedzy w rozwiązywaniu zadań. Reprezentacja wiedzy
Rysunek 10.2^_
Struktura funkcjonalna inteligentnego uczącego się robota HI generacji [103]
(tzn. forma jej wyrażania) powinna być wybrana z uwzględnieniem konkretnej kJasy zadań, do rozwiązania których jest przeznaczony robot.
Formy reprezentacji wiedzy przedstawiono na rys. 10.2.
Wiedza abstrakcyjna, czyli informacja o pewnych ogólnych prawidłowościach istniejących zarówno w zewnętrznym, jak i w wewnętrznym świecie inteligentnego robota. Informacje te zazwyczaj są traktowane jako względnie stałe. Należą do nich np. prawidłowości fizyczne istniejące w świecie zewnętrznym.
Wiedza o celach to informacje o celach globalnych, które robot powinien ciągnąć w procesie swego funkcjonowania, a także o sposobach ich dekompo-tycji na cele lokalne realizowane na etapach przejściowych.
Wyszukiwarka
Podobne podstrony:
P1080336 10. Sztuczna inteligencja w robotyceUCA6410CEMI Rysunek 1^_______ Obraz układu scalonego w
P1080340 10. Sztuczna inteligencja w robotyce Rysunek 10^___________ Całkowity czas realizacji wszys
P1080334 10. Sztuczna inteligencja w robotyce Zmodyfikowana waga 00.2) W procesie samouczenia, opisa
74879 P1080341 10. Sztuczna inteligencja w robotyce 10. Sztuczna inteligencja w robotyce Nowe wagi k
więcej podobnych podstron