34858 Untitled Scanned 24 (9)

3) Przemieszczenia (współczynniki i wyrazy wolne) będą miały wartości równe zeru, jeżeli tak dobierzemy układ podstawowy, aby rzędne jednego wykresu przyjmowały wartości równe zeru na wysokości środka ciężkości innego wykresu. W tym celu wprowadzamy (myślowo) nieskończenie sztywne wsporniki.
Dla ramy symetrycznej z rys. 13.24a przyjmujemy układ zastępczy pokazany na rys. 13.24b. Wykresy momentów od jednostkowych wartości niewiadomych sił pokazano na rys. 13.24c-?-e.
Ponieważ założyliśmy, że wspornik ma sztywność równą nieskończoności (EJ= oo), nie ma więc potrzeby obliczania całki dla wspornika, gdyż niezależnie od wartości mo
f
1
mentów
EJ J
Mj Mk dx=0. W tym przypadku wartości zerowe przyjmą współczynniki
ó12, Sl3 i S23, jak również symetryczne względem nich S2l, ó31, ó32.
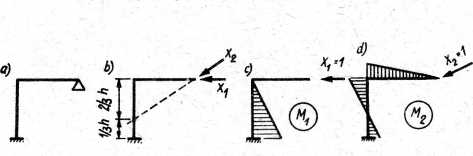
Przykład zastosowania nieskończenie sztywnych wsporników dla ramy niesymetrycznej z rys. 13.25a pokazano na rys. 13.25b. Wykresy momentów jednostkowych pokazano na rys. 13.25c, d, e. Przy takim układzie podstawowym otrzymamy:
ńi2—521—ń13—ń31—ń32—ń23—0
i w efekcie pełne rozdzielenie niewiadomych.
Na rys. 13.26a pokazano ramę, dla której bez wprowadzania sztywnych wsporników możemy tak dobrać układ zastępczy (rys. 13.26b), że rzędne jednego wykresu przyjmują wartość zero (rys. 13.26d) na wprost środków ciężkości wykresu drugiego (rys. 13.26c).
Inną ramę niesymetryczną pokazano na rys. 13.27a. W tym przypadku dla uzyskania jak największej liczby współczynników (w równaniach kanonicznych) równych zeru, zastosujemy kilka nieskończenie sztywnych wsporników. Odpowiedni układ zastępczy pokazano na rys. 13.27b, a wykresy momentów od jednostkowych niewiadomych na rys. 13.27c-^h. Linię działania siły X3 dobieramy tak, aby łączyła środki ciężkości słupów AB i DC, a linię działania siły X6 jako łączącą środki ciężkości słupów CD i FG. Otrzymamy wówczas:
^14—^16 — ń24 —<525 —^26 — ^34 — ^35 ~0 •
Rys. 13.26
Sposób powyższy okaże się jeszcze bardziej przydatny dla ramy symetrycznej pokazanej na rys. 13.28a. Rozmieszczenie niewiadomych pokazano na rys. 13.28b; wykresy momentów dla stanów X1 — l /.. X6 = l — na rys. 13.28c-hh. Otrzymamy tu:
^13 =^14 = ^15 =^23 =^24 = ^25 ~^26 = ^35 = ^36 ==^45 =^46 =0-
462
Wyszukiwarka
Podobne podstrony:
Untitled Scanned 24 Ćwiczenie umiejętności ortograficznych Wyrazy z „rz" po spółgłoskachC 1.6 P
Untitled Scanned 24 (7) Ćwiczenie umiejętności ortograficznych Wyrazy z „rz" po spółgłoskachC 1
Untitled Scanned 24 Ćwiczenia w pisaniu Pisanie, uzupełnianie i przekształcanie zdańB 4.3 Q Przyjrzy
Untitled Scanned 24 60 (3) (q -> p) -» [P -*<?)-> [p a r <-* q a r)] 1
Untitled Scanned 24 fi.M.iitetcmme ćodąWi caZKOwcUjda 6acm^ womej tr pomoj Kd: w
82724 Untitled Scanned 24 (11) Wskazówki dla nauczycieliA 4 w. 138 Pole, w których iloczyn równy jes
Untitled Scanned 24 o Kj-J Ab WYDZIAŁ ZARZĄDZANIA U.W. STUDIA STACJONARNE ROK AKADEMICKI 1999/2000Im
Untitled Scanned 24 V. KĄTY WIDZENIA KAMERY luk ość obiektywu, którym dokonano zdjęcia, wpływać może
Untitled Scanned 24 (2) przyjmując za [4] - w = 0,751, otrzymamy ostatecznie: k10 = 20,94- 0,751 = 1
60692 Untitled Scanned 24 - 48 - dowanych z elementów innych rodzajów, pełnią często rolę wzmacniacz
Untitled Scanned 24 (11) Wskazówki dla nauczycieliA 4 w. 138 Pole, w których iloczyn równy jest: — &
Untitled Scanned 24 (2) C.Z£uVoJc(_____h/ i (łAf/2v:j i oVL£tT i :oi Iy }~ f • I- i,Q s? J MV U DH
więcej podobnych podstron