39751 SDC13005
10.2. Podział serwonapędów
mi analogowymi serwonapędy cyfrowe są zdolne realizować znacznie hardziej skomplikowane algorytmy sterowania (np. w serwonapędach analogowych najczęściej stosuje się liniowe regulatory klasyczne typu P, PI, PID, a bardzo rzadko nieliniowe), o których będzie mowa w rozdz. 10.6.
Do rzadkości należą przypadki, w których można mówić tylko o serwonapę-dzie analogowym lub cyfrowym. W rzeczywistych serwonapędach stosuje się zarówno przetwarzanie analogowe, jak i cyfrowe. W najczęściej spotykanych obrabiarkach NC z klasycznym interpolatorem liniowym lub kołowym tylko zadajnik wartości przemieszczenia (interpolator) jest cyfrowy. Wszystkie pozostałe człony obwodu regulacji (łącznie z interfejsami łączącymi sterowanie NC ze sterownikami napędów) są budowane w technice analogowej (może z wyjątkiem układów pomiarowych położenia, które buduje się zarówno w technice analogowej, jak i cyfrowej). To stało się powodem, dla którego nieco inaczej definiuje się napędy cyfrowe. Podstawą zakwalifikowania serwonapędu do cyfrowego lub analogowego stał się interfejs między sterowaniem NC i sterownikiem napędu. W rozdziale 11 szczegółowo omówiono to zagadnienie.
Podział serwonapędów na ciągłe i nieciągłe, zwane też dyskretnymi, wynika z postaci sygnałów sterujących i pomiarowych.
W serwonapędach ciągłych sygnały pomiarowe z czujników, porównywanie sygnałów w obwodach regulacyjnych i przetwarzanie sygnałów mają postać ciągłego sygnału napięciowego w standardzie ±10 V
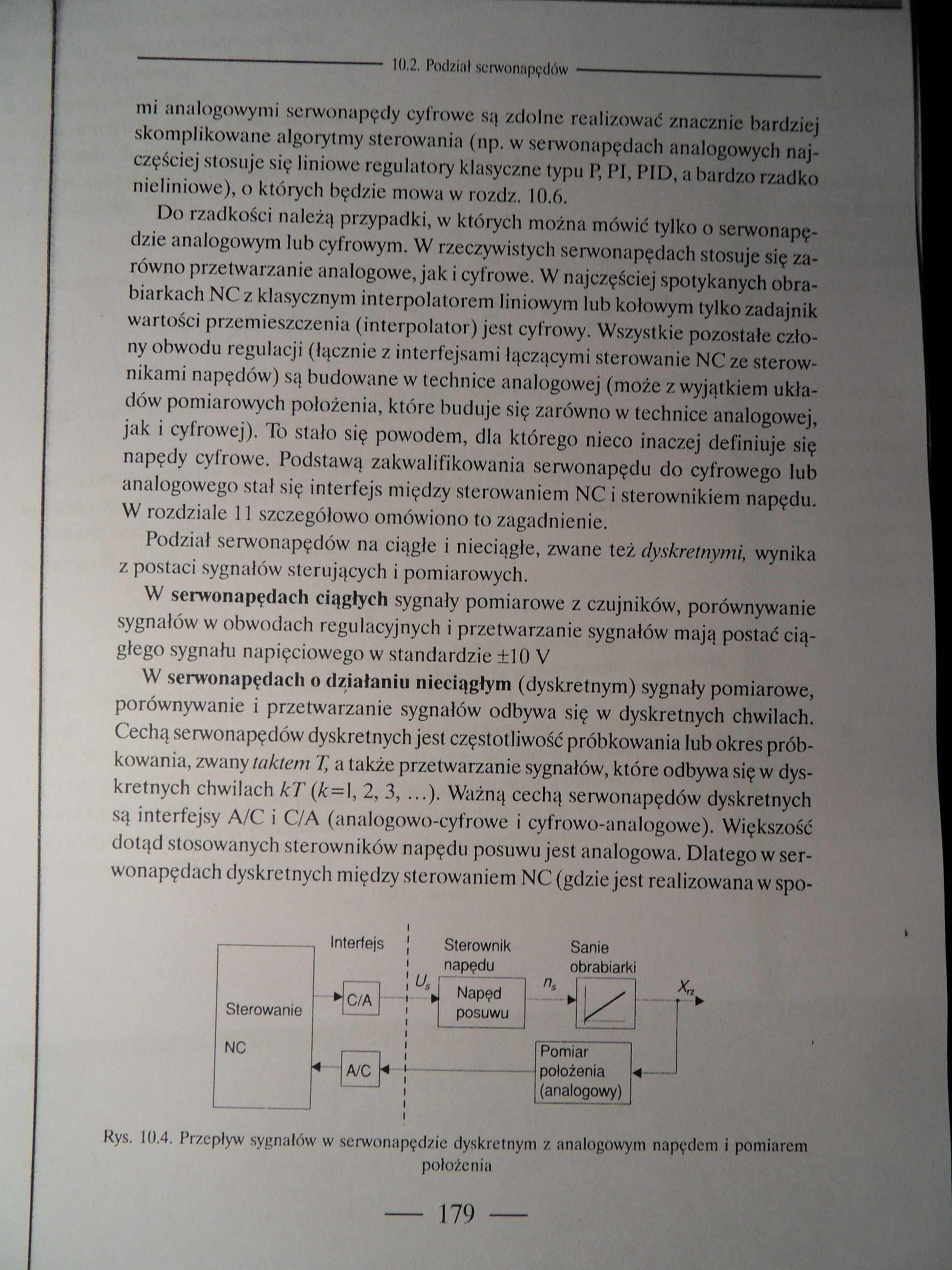
W serwonapędach o działaniu nieciągłym (dyskretnym) sygnały pomiarowe, porównywanie i przetwarzanie sygnałów odbywa się w dyskretnych chwilach. Cechą serwonapędów dyskretnych jest częstotliwość próbkowania lub okres próbkowania, zwany taktem T, a także przetwarzanie sygnałów, które odbywa się w dyskretnych chwilach kT (k=1, 2, 3, ...). Ważną cechą serwonapędów dyskretnych są interfejsy A/C i C/A (analogowo-cyfrowe i cyfrowo-analogowe). Większość dotąd stosowanych sterowników napędu posuwu jest analogowa. Dlatego w serwonapędach dyskretnych między sterowaniem NC (gdzie jest realizowana w spo-
|
Interfejs j Sterownik Sanie 1 napędu obrabiarki | |||
|
Sterowanie |
L_J i posuwu |
K* ---i—► | |
|
1 | |||
|
NC |
fol ■ __▼ |
Pomiar położenia (analogowy) |
4- |
Rys. 10.4. Przepływ sygnałów w serwonapędzic dyskretnym z analogowym napędem i pomiarem
położenia
179 —
Wyszukiwarka
Podobne podstrony:
SDC13004 10. Podstawy automatycznej regulacji położenia w obrabiarkach NC — serwonapydy działaniem k
IMGD74 Podział serwonapędów prądu stałego
DSC00640 (10) liniowe SERWONAPĘDOWE SILNIKI PRĄDU STAŁEGO ze wzbudzeniem elektromagnetycznym o małym
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
EJ Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1.afs [C:Documents and SettingsLAB32Moje
EJ Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1.afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
El Engineer HighLevel 2.10.2.0 (SP2) - Serwonapedy_1 .afs [C:Documents and SettingsLAB32Moje
więcej podobnych podstron