49079 P1080232
4. Wprowadzenie do kinematyki robotów
4.3.2. Kinematyka manipulatora równoległego typu hexapod
Do rozwiązania zadania prostego manipulatora równoległego typu hexapod 6-3 stosuje się metodę wektorową. Wektorami platformy są: P\0, P2o i P30, jak poka. zano na rys. 4.22.
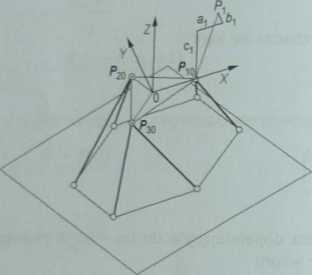
Rysunek 4.22_
Struktura geometryczna hexapoda 6-3
Platformę roboczą tworzy trójkąt równoboczny o boku L. Wtedy długości wektorów OPn (dla /= 1,2,3) wynoszą
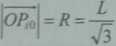
(4.60)
Kiedy wektory platformy przemieszczają się z P*, do P„ wtedy
Pi — Pio + AP/ = Pn + di + bi + cf ’’ (4.61)
gdzie: a„ b, i c, są przesunięciami punktu P*, wzdłuż osi X, Y, Z.
Dla przesunięcia stałe są długości boków trójkąta równobocznego, jaki tworzy platforma. Z tego wynika
I Pi-Pt MPio-Pjo P I I I (4.«)
gdzie: i,j brane są w porządku cyklicznym. Stąd wynika równanie
2\P,o-P,o\|A/>(-AP,| + |AP,-APyp=0 ‘ (4.63)
które następnie jest przekształcane do postaci
\2Pjo- AP -2Pl0 - \Pj -2P/0 AP, + 2Pj0 -APj | + AP? -2AP, ■ AP, + AP? = °
f (4.64)
W równaniu tym można uwzględnić wektory a,-, &; i e„ wtedy kilka wartości iloczynów skalarnych można usunąć z powodu prostopadłości. Pozostałe kąty mają wartości 0°, 30°, 120° i 210°. Po wstawieniu wartości cosinusów i kilku uproszczeniach otrzymuje się równanie
a]+a'j —j=[(bl -bj)—(-j3a'i -b'j){4?>a'j-b'j)-(a\ - a))2 -{b]+b'j)2-{c\ -c))2]
(4.65)
gdzie
, _ai
(4.66)
Dla małych przemieszczeń wartości powyższych wyrażeń są bliskie jedności.
a)
p
b)
p
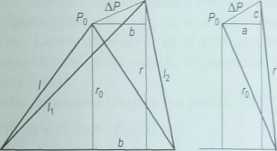
Rysunek 4.^____
Geometria pary kończyn hexapoda
Na rysunku 4.23 przedstawiono pary kończyn w rzutach na płaszczyzny YZ i XZ. Biorąc pod uwagę trójkąty l\r i Ur na rys. 4.23a oraz używając twierdzenia Pitagorasa, można otrzymać równania
ó"=I(/"2-#2)=(A/r- a/d i+—(A/r+Af)

(4.67)
(4.68)
gdzie

/
(4.69)
Z trójkąta prostokątnego zawierającego bok r (4.23b) można ułożyć równanie
(4.70)
111
Wyszukiwarka
Podobne podstrony:
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora
P1080222 4. Wprowadzenie do kinematyki robotów dalej przykłady będą częściej dotyczyć tej konfigurac
72842 P1080233 4. Wprowadzenie do kinematyki robotów wtedy 4. Wprowadzenie do kinematyki robotów c &
więcej podobnych podstron