49198 skanuj0414
a krzywki płaskiej o ruchu postępowym (rys. 16.116) — jako linia prosta pochyła.
Przy ruchu popychacza nie wymagającym stałej prędkości są stosowane inne krzywe o przebiegu ustalonym (np. spirala logarytmiczna) lub dowolnym.
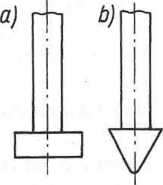
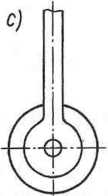
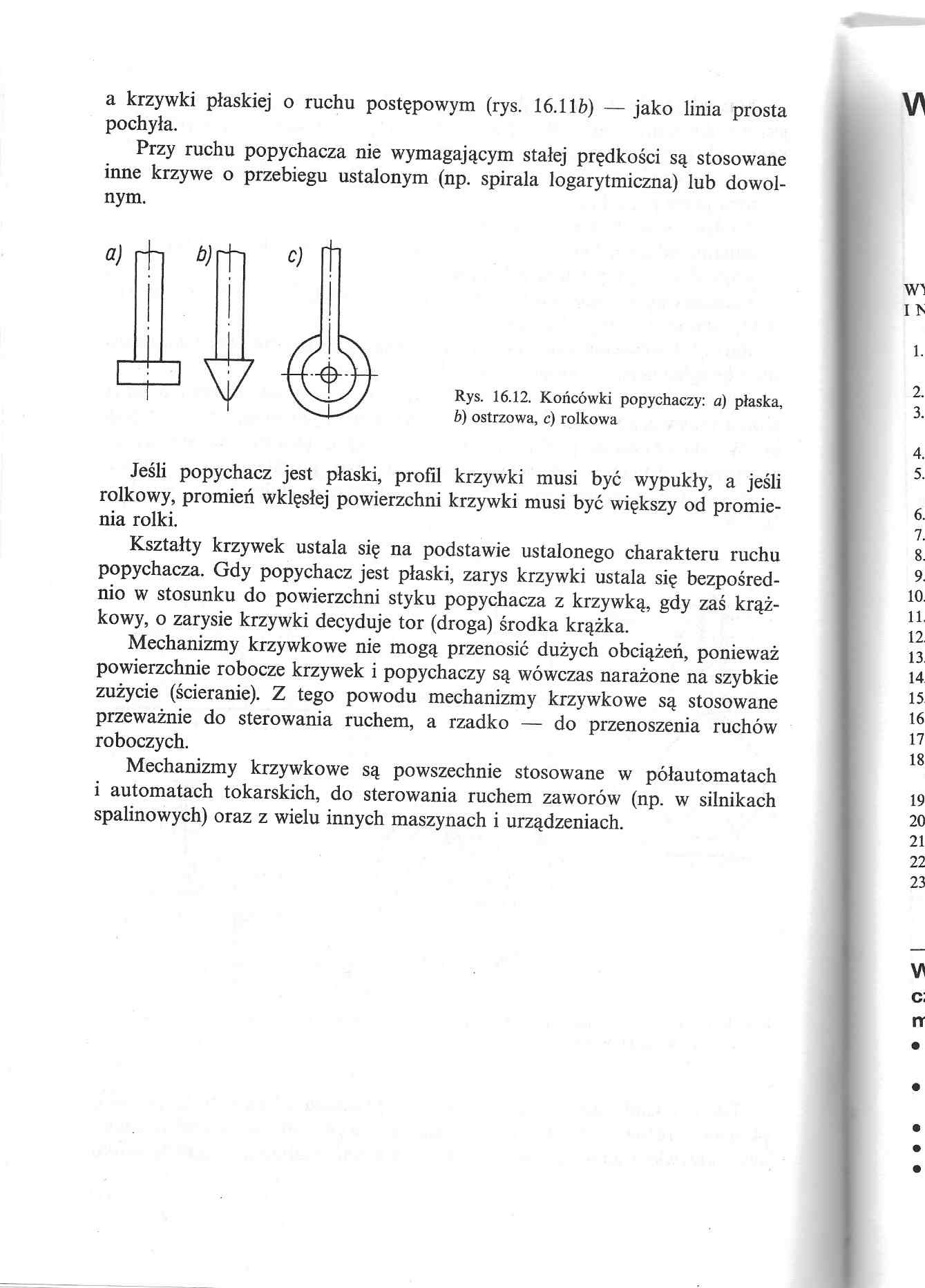
Rys. 16.12. Końcówki popychaczy: a) płaska, b) ostrzowa, c) rolkowa
Jeśli popychacz jest płaski, profil krzywki musi być wypukły, a jeśli rolkowy, promień wklęsłej powierzchni krzywki musi być większy od promienia rolki.
Kształty krzywek ustala się na podstawie ustalonego charakteru ruchu popychacza. Gdy popychacz jest płaski, zarys krzywki ustala się bezpośrednio w stosunku do powierzchni styku popychacza z krzywką, gdy zaś krążkowy, o zarysie krzywki decyduje tor (droga) środka krążka.
Mechanizmy krzywkowe nie mogą przenosić dużych obciążeń, ponieważ powierzchnie robocze krzywek i popychaczy są wówczas narażone na szybkie zużycie (ścieranie). Z tego powodu mechanizmy krzywkowe są stosowane przeważnie do sterowania ruchem, a rzadko — do przenoszenia ruchów roboczych.
Mechanizmy krzywkowe są powszechnie stosowane w półautomatach i automatach tokarskich, do sterowania ruchem zaworów (np. w silnikach spalinowych) oraz z wielu innych maszynach i urządzeniach.
Wyszukiwarka
Podobne podstrony:
skanuj0093 (29) 166 B. Cieślar Na rys. 4.16.2 pokazano wykresy sił wewnętrznych, sporządzone na pods
Kolendowicz38 ■ Silę podłużną w przekroju k (rys. 16-8) obliczymy jako sumę rzutów wszystkich sił po
scan0023 (16) Wskaźniki i lampki sygnalizacyjne • Jeżeli lampka przy włączeniu zapłonu nie zaświeca
scan0023 (16) Wskaźniki i lampki sygnalizacyjne • Jeżeli lampka przy włączeniu zapłonu nie zaświeca
56574 skanuj0012 (64) rys. 16 1. bieg -2. bieg -3 .bieg -4. bieg -5. bieg -Opory toczenia -Opory ruc
skanuj0084 (31) Tmfwahs Redus capilis posterior nkjor Ocapilal btlly of I ^ occipito/rontalii I Mati
więcej podobnych podstron