53672 P1010332 (2)
Sterowniki prądu przemiennego
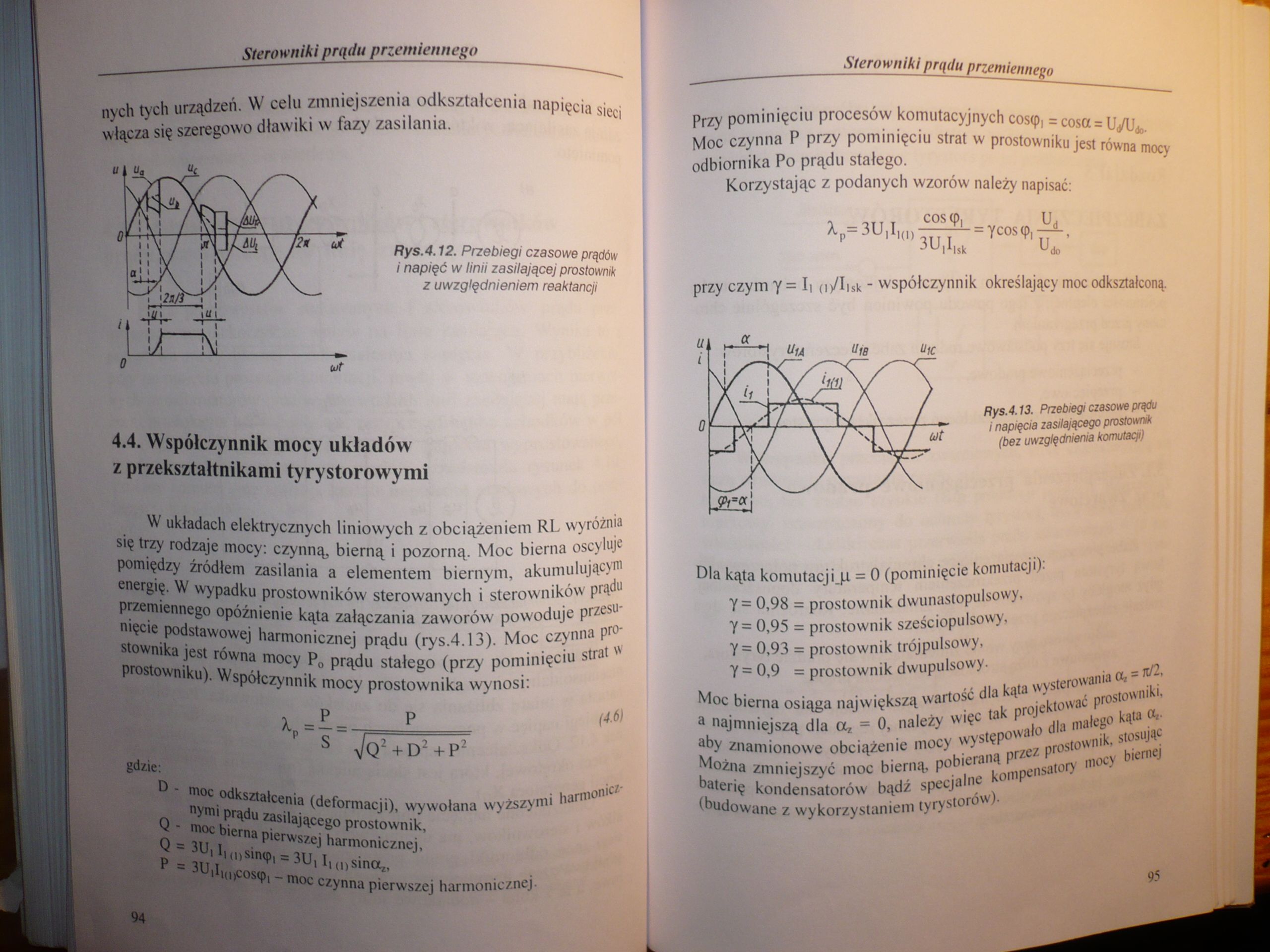
nych tych urządzeń. W celu zmniejszenia odkształcenia napięcia sieci włącza się szeregowo dławiki w fazy zasilania.
Rys. 4.12. Przebiegi czasowe prądów i napięć w linii zasilającej prostownik z uwzględnieniem reaktancji
4.4. Współczynnik mocy układów z przekształtnikami tyrystorowymi
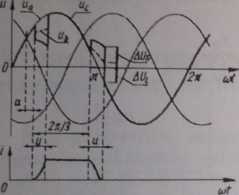
W układach elektrycznych liniowych z obciążeniem RL wyróżnia się trzy rodzaje mocy: czynną, bierną i pozorną. Moc bierna oscyluje pomiędzy źródłem zasilania a elementem biernym, akumulującym energię. W wypadku prostowników sterowanych i sterowników prądu przemiennego opóźnienie kąta załączania zaworów powoduje przesunięcie podstawowej harmonicznej prądu (rys.4.13). Moc czynna prostownika jest równa mocy P0 prądu stałego (przy pominięciu strat w prostowniku). Współczynnik mocy prostownika wynosi:
P
P

D - moc odkształcenia (deformacji), wywołana wyższymi harmonicznymi prądu zasilającego prostownik,
Q - moc bierna pierwszej harmonicznej,
Q = 3Ui l|(i)Sin(p, = 3Ut lim sina,,
P = 3UiIm)COsq>i - moc czynna pierwszej harmonicznej.
(4.6)
gdzie.
Przy pominięciu procesów komutacyjnych costp, = cosa=U/Ud„. Moc czynna P przy pominięciu strat w prostowniku jest równa mocy odbiornika Po prądu stałego.
Korzystając z podanych wzorów należy napisać:
, ... _ costp, U,
^p=3U,I1(I)——-L = Ycos(plT^-
JUlAlsk Udo
przy czym y = l\ (1)/I|Sk - współczynnik określający moc odkształconą.
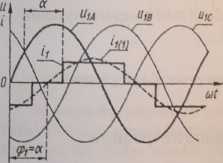
Rys.4.13. Przebiegi czasowe prądu i napięcie zasilającego prostownik (baz uwzględnienia komutacji)
Dla kąta komutacjiji = 0 (pominięcie komutacji): y= 0,98 = prostownik dwunastopulsowy, y= 0,95 = prostownik sześciopulsowy,
Y = 0,93 = prostownik trójpulsowy,
Y = 0,9 = prostownik dwupulsowy.
Moc bierna osiąga największą wartość dla kąta wysterowania d, = a/2, a najmniejszą dla ot* = 0, należy więc tak projektować prostowniki, aby znamionowe obciążenie mocy występowało dla małego kąta a,. Można zmniejszyć moc bierną pobieraną przez prostownik, stosując baterię kondensatorów bądź specjalne kompensatory mocy biernej (budowane z wykorzystaniem tyrystorów).
95
Wyszukiwarka
Podobne podstrony:
P1010330 (2) Sterowniki prądu przemiennego mogą znaleźć zastosowanie w układach małej i średniej moc
P1010326 (2) Sterowniki prądu przemiennego Najczęściej stosowane jest sterowanie fazowe i grupowe, d
P1010328 (2) Sterowniki prądu przemiennego Dla układów większych mocy P > 2 kW stosuje się sterow
P1010329 (2) Sterowniki prądu przemiennego Sterowniki impulsowe budowane są z wykorzystaniem tranzys
43756 P1010327 (2) Sterowniki prądu przemiennego Na rysunku 4.4 przedstawiono charakterystyki sterow
2.Sterownik prądu przemiennego 1 fazowy ze sterowaniem impulsowym i obciążeniu RL. Projekt i budowa
zagadnienia2energo kolokwium cz.2 37. Sterownik prądu przemiennego, trójfazowy 38.
zastosowanie sterowników. Sterowniki prądu przemiennego sąwykarzy stywaae przy budowie regulatorów i
Scan0050 2 Zasadę pracy trójfazowego sterownika prądu przemiennego, którego scheffia funkcjonalny pr
2tom311 8. ENERGOELEKTRONIKA 624d) Rys. 8.52. Trójfazowe sterowniki prądu przemiennego: a) układ gwi
8. Sterownik prądu przemiennego (Piotr Musznicki) 155 8.1
więcej podobnych podstron