54004 Slajd51 (12)
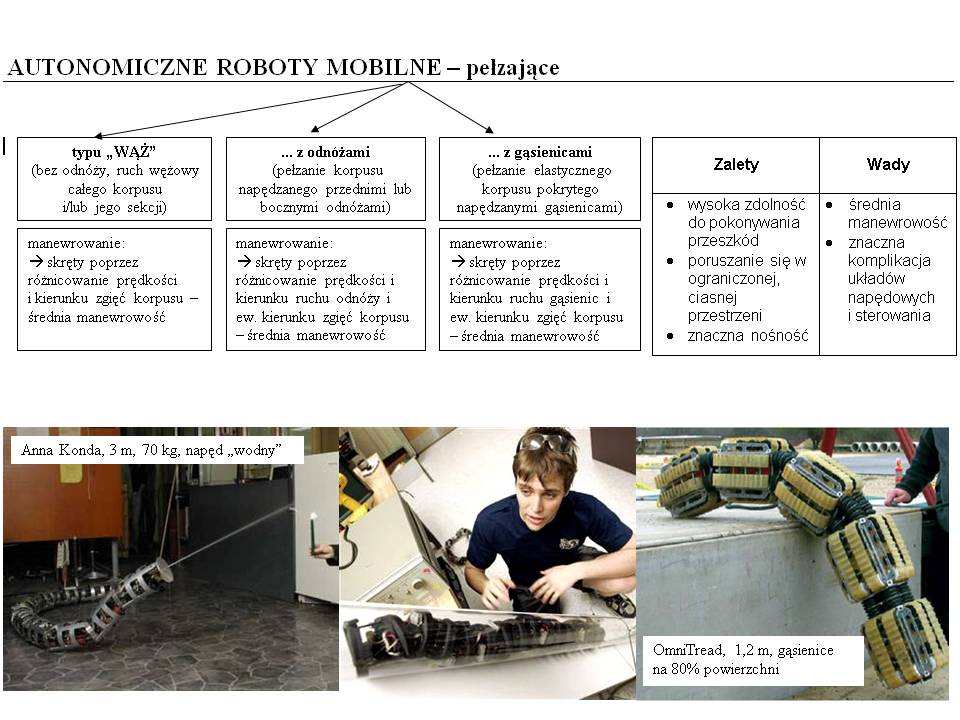

typu „WĄZ”
(bez odnóży, ruch wężowy całego korpusu i/lub jego sekcji)
... z odnóżami
(pełzanie korpusu napędzanego przednimi lub bocznymi odnóżami)
manewrowanie: skręty poprzez różnicowanie prędkości i kierunku zgięć korpusu -średnia manewrowo ść
manewrowanie: skręty poprzez różnicowanie prędkości i kierunku ruchu odnóży i ew. kierunku zgięć korpusu -średnia manewrowo ść
manewrowanie: skręty poprzez różnicowanie prędkości i kierunku ruchu gąsienic i ew. kierunku zgięć korpusu -średnia manewrowo ść
... z gąsienicami
(pełzanie elastycznego korpusu pokrytego napędzanymi gąsienicami)
|
Zalety |
Wady |
|
• wysoka zdolność do pokonywania przeszkód • poruszanie się w ograniczonej, ciasnej przestrzeni • znaczna nośność |
• średnia manewrowość • znaczna komplikacja układów napędowych i sterowania |
Anna Konda, 3 m, 70 kg, napęd „wodny’
|
- * |
1’ ) | |
OmmTread, 1,2 m, gąsienice na 80% powierzchni
Wyszukiwarka
Podobne podstrony:
74360 Slajd56 (12) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) (2,0) - robot zwany unic
72626 Slajd55 (12) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (ca.) (3,0) - robot holonomicz
Slajd59 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) Jeszcze inne.....złożone (1-3&
więcej podobnych podstron