72626 Slajd55 (12)
AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (ca.)
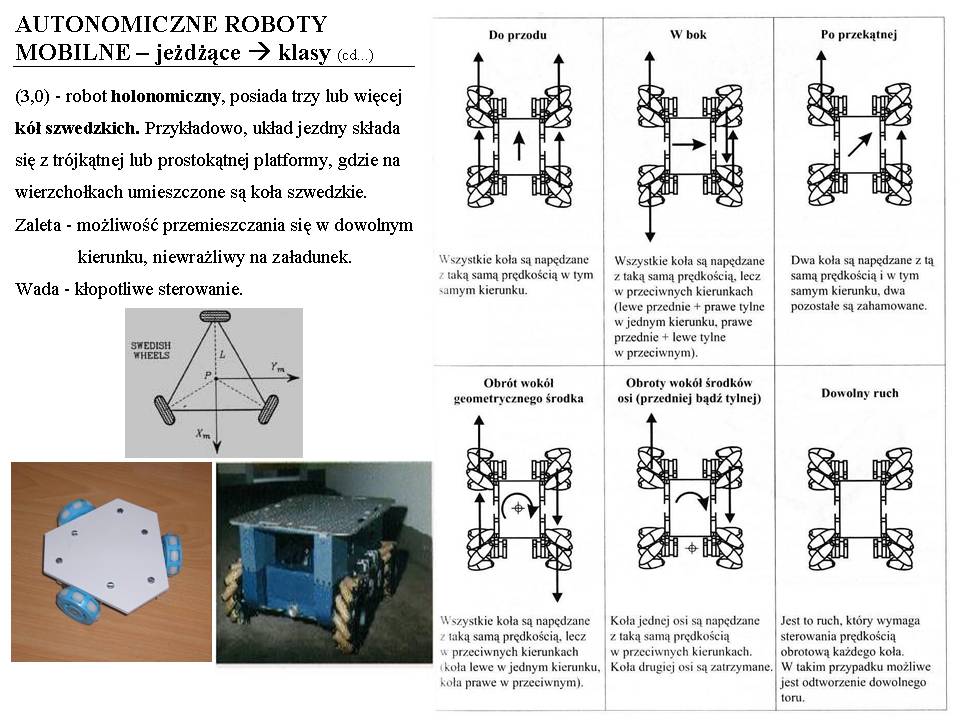
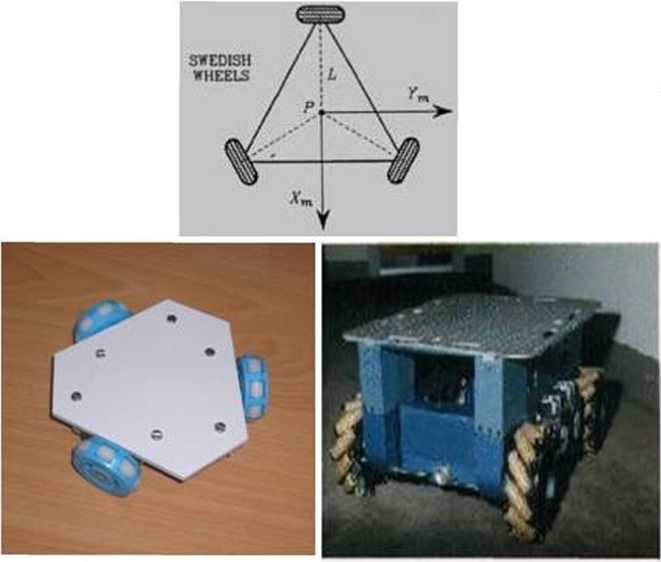
(3,0) - robot holonomiczny, posiada trzy lub więcej kół szwedzkich. Przykładowo, układ jezdny składa się z trójkątnej lub prostokątnej platformy, gdzie na wierzchołkach umieszczone są koła szwedzkie.
Zaleta - możliwość przemieszczania się w dowolnym kierunku, niewrażliwy na załadunek.
Wada - kłopotliwe sterowanie.
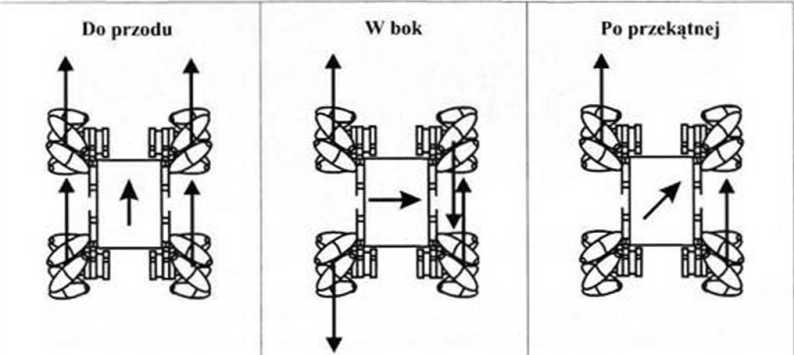
W szystkic koła są napędzane laką samą prędkością w tym 'Umym kierunku.
Wszystkie koła są napędzane / laką samą prędkością, lecz w przeciwnych kierunkach (lewe przednie + prawe tylne w jednym kierunku, prawe przednie + lewe tylne w przeciwnym).
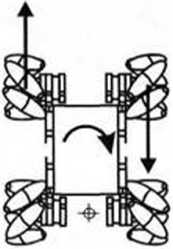
Dwa koła są napędzane z tą samą prędkością i w tym samym kierunku, dwa pozostałe są zahamowane.
Obrót wokół geometrycznego środka
Obroty wokół środków osi (przedniej bądź tylnej)
Dowolny ruch
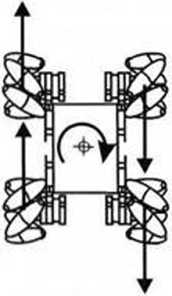
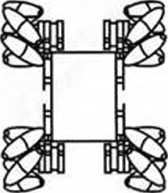
W N/ysikie koła są napędzane laką samą prędkością, lecz w przeciwnych kierunkach koła lewe w jednym kierunku, koła prawe w przeciwnym).
Koła jednej osi są napędzane / laką samą prędkością w przeciwnych kierunkach. Koła drugiej osi są zatrzymane.
Jest to ruch. który wymaga sterowania prędkością obrotow ą każdego koła.
W takim przypadku możliwe jest odtworzenie dowolnego toru.
Wyszukiwarka
Podobne podstrony:
74360 Slajd56 (12) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) (2,0) - robot zwany unic
55491 Slajd57 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) (1,1) - robot zwany samo
Slajd59 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) Jeszcze inne.....złożone (1-3&
78638 Slajd54 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy Klasa robota mobilnego zapisyw
54004 Slajd51 (12) AUTONOMICZNE ROBOTY MOBILNE - pełzające typu „WĄZ” (bez odnóży, ruch wężowy całeg
45189 Slajd53 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> rodzaje kół koło bierne - pojedyncze
Slajd58 (13) STEERING WHEELS CASTOR WHEELAUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) (1
Slajd58 (13) STEERING WHEELS CASTOR WHEELAUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) (1
więcej podobnych podstron