78638 Slajd54 (13)
AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy
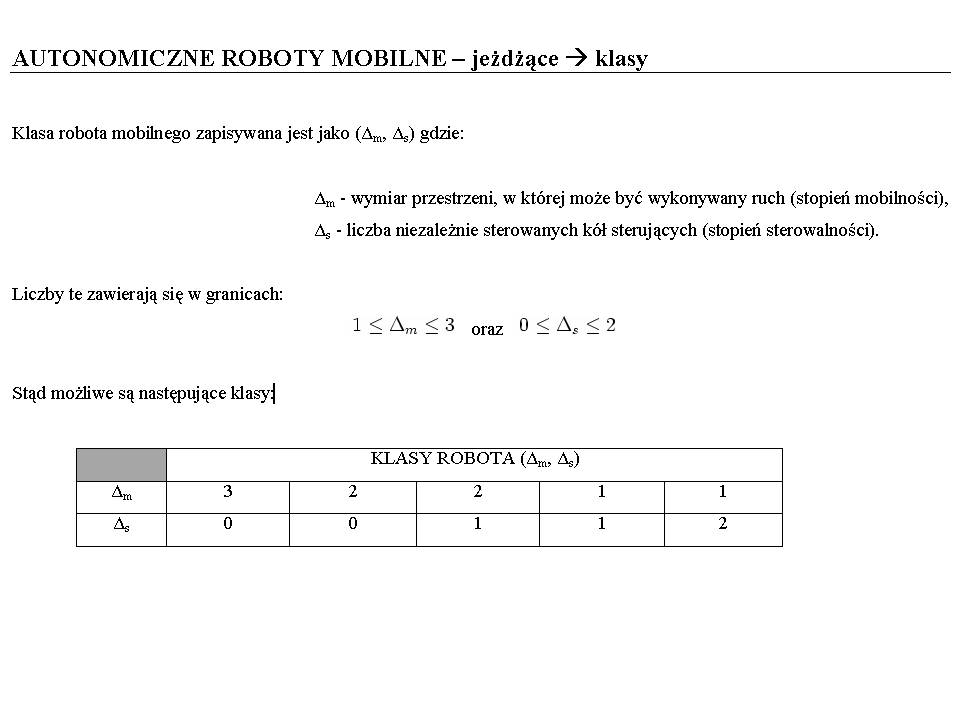
Klasa robota mobilnego zapisywana jest jako (Am, Ag) gdzie:
Am - wymiar przestrzeni, w której może być wykonywany ruch (stopień mobilności), A* - liczba niezależnie sterowanych kół sterujących (stopień sterowalności).
Liczby te zawierają się w granicach:
Stąd możliwe są następujące klasy]
|
KLASY ROBOTA (Am, A^ | |||||
|
Ara |
3 |
2 |
2 |
1 |
1 |
|
As |
0 |
0 |
1 |
1 |
2 |
Wyszukiwarka
Podobne podstrony:
Slajd59 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) Jeszcze inne.....złożone (1-3&
55491 Slajd57 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) (1,1) - robot zwany samo
45189 Slajd53 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> rodzaje kół koło bierne - pojedyncze
74360 Slajd56 (12) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) (2,0) - robot zwany unic
72626 Slajd55 (12) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (ca.) (3,0) - robot holonomicz
slajd50 (15) AUTONOMICZNE ROBOTY MOBILNE - latające -> wybór ... Robot - sterowiec: -
54004 Slajd51 (12) AUTONOMICZNE ROBOTY MOBILNE - pełzające typu „WĄZ” (bez odnóży, ruch wężowy całeg
więcej podobnych podstron