55491 Slajd57 (13)
AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd )
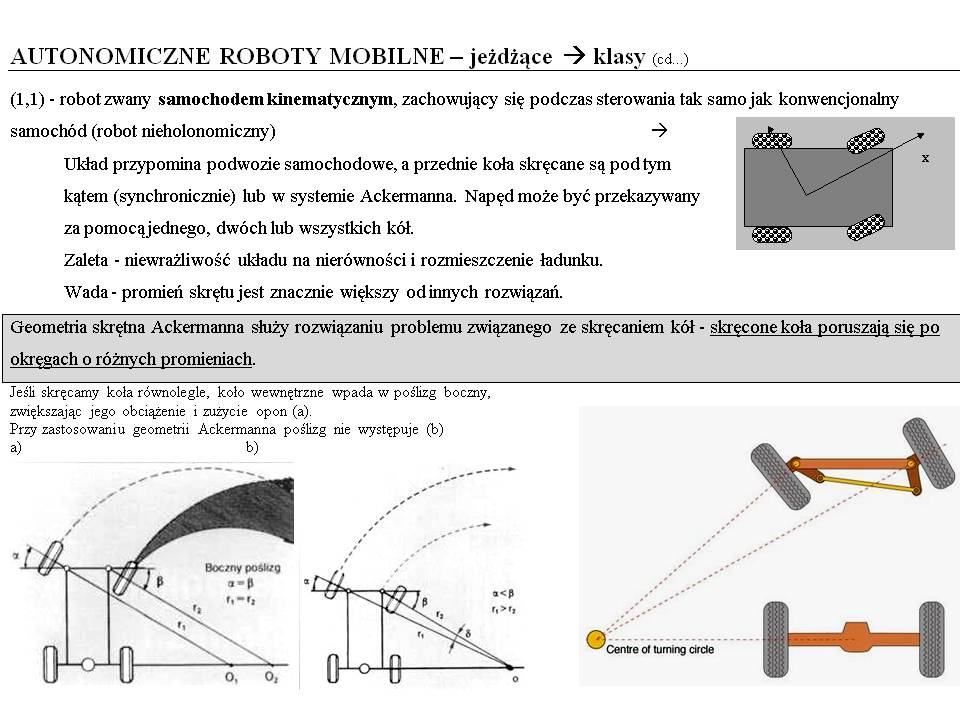
(1,1) - robot zwany samochodem kinematycznym, zachowujący się podczas sterowania tak samo jak konwencjonalny samochód (robot nieholonomiczny) A
Układ przypomina podwozie samochodowe, a przednie koła skręcane są pod tym kątem (synchronicznie) lub w systemie Ackermanna. Napęd może być przekazywany za pomocą jednego, dwóch lub wszystkich kół.
Zaleta - niewrażliwość układu na nierówności i rozmieszczenie ładunku.
Wada - promień skrętu jest znacznie większy od innych rozwiązań.
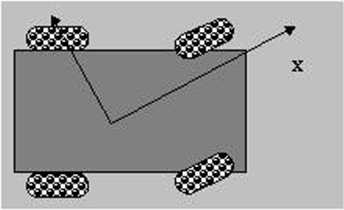
Geometria skrętna Ackermanna służy rozwiązaniu problemu związanego ze skręcaniem kół - skręcone koła poruszają się po okręgach o różnych promieniach.
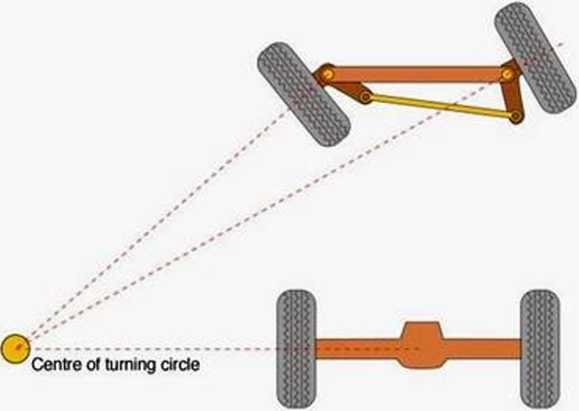
Jeśli skręcamy koła równolegle, koło wewnętrzne wpada w poślizg boczny, zwiększając jego obciążenie i zużycie opon (a).
Przy zastosowaniu geometrii Ackermanna poślizg nie występuje (b) a) b)


Wyszukiwarka
Podobne podstrony:
74360 Slajd56 (12) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) (2,0) - robot zwany unic
Slajd59 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) Jeszcze inne.....złożone (1-3&
78638 Slajd54 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy Klasa robota mobilnego zapisyw
72626 Slajd55 (12) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (ca.) (3,0) - robot holonomicz
45189 Slajd53 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> rodzaje kół koło bierne - pojedyncze
Slajd58 (13) STEERING WHEELS CASTOR WHEELAUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) (1
Slajd58 (13) STEERING WHEELS CASTOR WHEELAUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) (1
Slajd83 (7) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -» typowe rodzaje wózków AGV Robot - platforma tr
Slajd87 (7) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -» przykłady zastosowań AGV Transport surowców&nb
więcej podobnych podstron