Slajd58 (13)
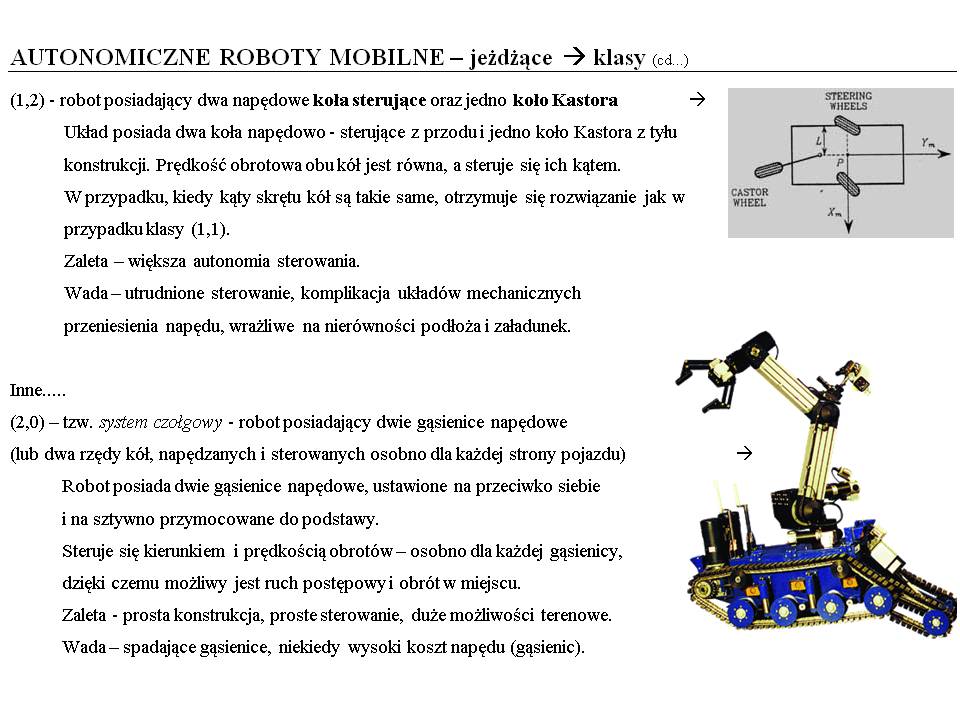
STEERING
WHEELS
CASTOR
WHEEL
AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd )
(1,2) - rob ot p o siadaj ący dwa nap ędo we koła s teruj ąc e oraz j edno koło Kas tor a ->
Układ posiada dwa koła napędowo - sterujące z przodu i jedno koło Kastora z tyłu konstrukcji. Prędkość obrotowa obu kół jest równa, a steruje się ich kątem.
W przypadku, kiedy kąty skrętu kół są takie same, otrzymuje się rozwiązanie jak w przypadku klasy (1,1).
Zaleta - większa autonomia sterowania.
Wada-utrudnione sterowanie, komplikacja układów mechanicznych przeniesienia napędu, wrażliwe na nierówności podłoża i załadunek.
Inne.....
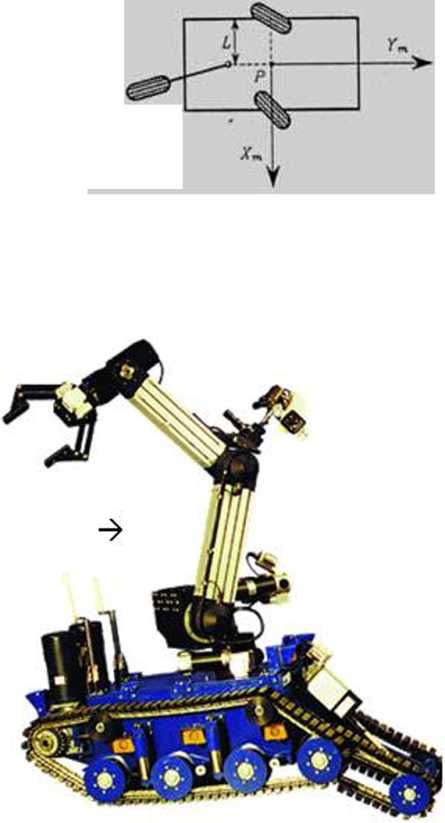
(2,0) - tzw. system czołgowy - robot posiadający dwie gąsienice napędowe (lub dwa rzędy kół, napędzanych i sterowanych osobno dla każdej strony pojazdu) Robot posiada dwie gąsienice napędowe, ustawione na przeciwko siebie i na sztywno przymocowane do podstawy.
Steruje się kierunkiem i prędkością obrotów - osobno dla każdej gąsienicy, dzięki czemu możliwy jest ruch postępowy i obrót w miejscu.
Zaleta - prosta konstrukcja, proste sterowanie, duże możliwości terenowe. Wada-spadające gąsienice, niekiedy wysoki koszt napędu (gąsienic).
Wyszukiwarka
Podobne podstrony:
Slajd58 (13) STEERING WHEELS CASTOR WHEELAUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) (1
Slajd59 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) Jeszcze inne.....złożone (1-3&
55491 Slajd57 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) (1,1) - robot zwany samo
74360 Slajd56 (12) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) (2,0) - robot zwany unic
78638 Slajd54 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy Klasa robota mobilnego zapisyw
72626 Slajd55 (12) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (ca.) (3,0) - robot holonomicz
45189 Slajd53 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> rodzaje kół koło bierne - pojedyncze
Slajd83 (7) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -» typowe rodzaje wózków AGV Robot - platforma tr
Slajd87 (7) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -» przykłady zastosowań AGV Transport surowców&nb
więcej podobnych podstron