65090 skanuj0001 (340)
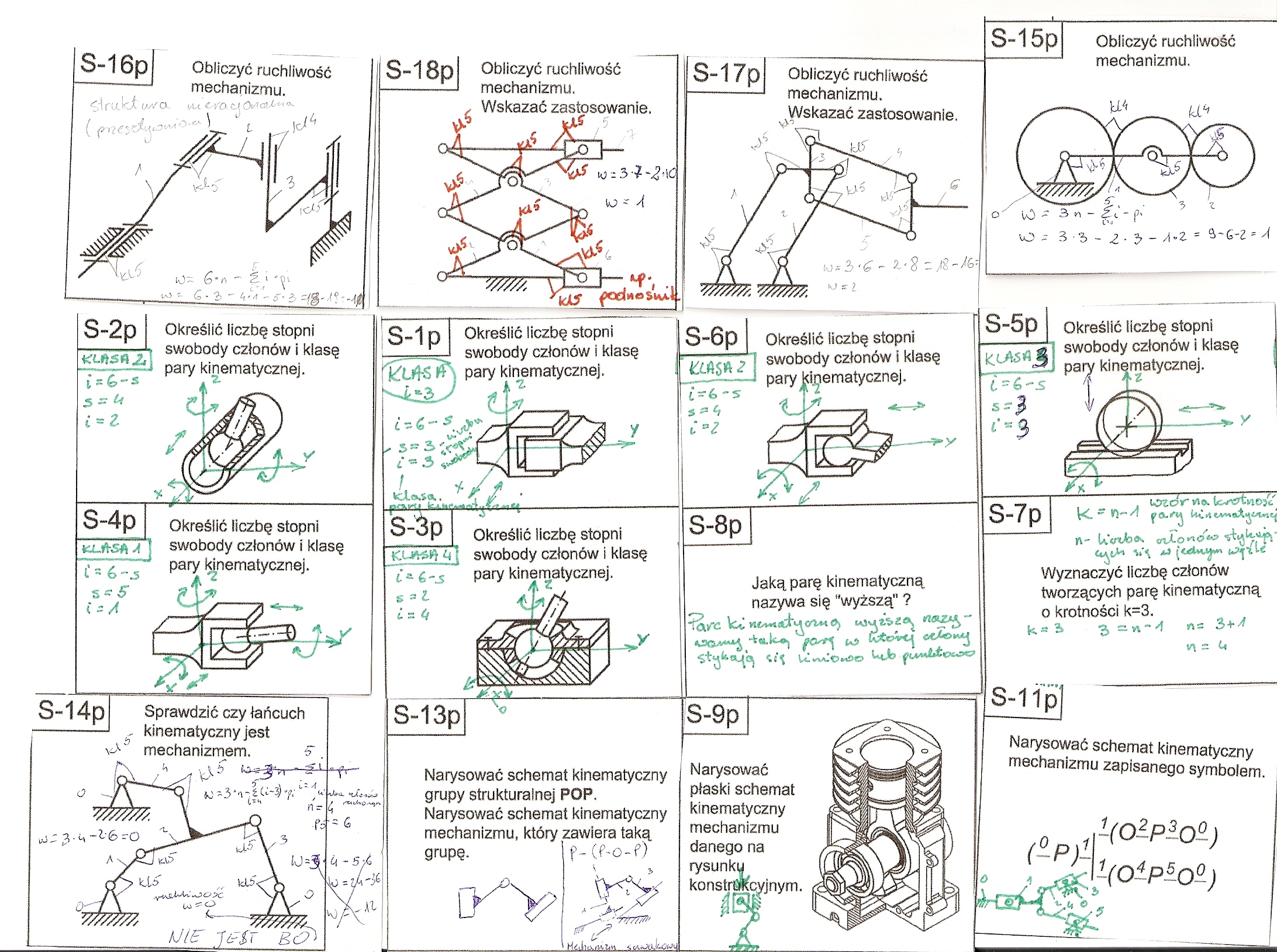
S-16p
S-18p
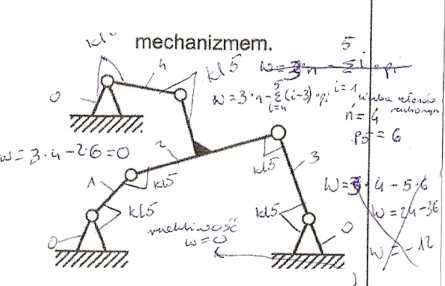
Obliczyć ruchliwość mechanizmu.
<-| r u. lot (/// a. i/u c-m. cj <v °-
( L/ Ł .
t0— 6* fi 1 ' 0 ^
^ • <S • 2> " i\* a - $• 3 -/S' /(? -
. Wskazać zastosowanie.

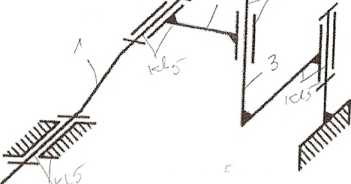
S-2p
S-1p
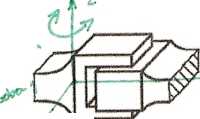
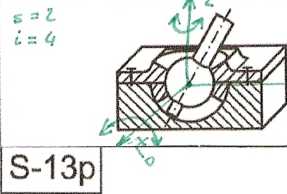
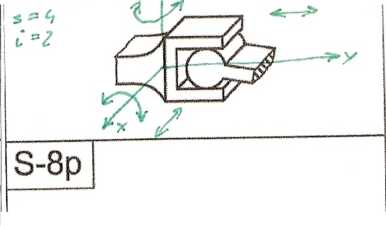
Określić liczbę stopni swobody członów i klasę pary kinematycznej.
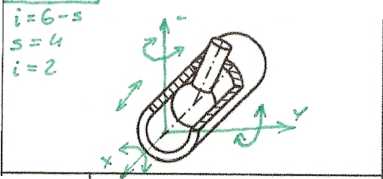
S-4p
Określić liczbę stopni • swobody członów i klasę Yzi-s’* P9^kinematycznej.
s- 5"
t -/f
3L4v
S-14p
Sprawdzić czy łańcuch - kinematyczny jest
UIB J£$T BO
i ~ 3 «v
pary kinematycznej.
Obliczyć ruchliwość mechanizmu.
Określić liczbę stopni swobody członów i klasę

Określić liczbę stopni swobody członów i klasę pary kinematycznej.
S-6p
Określić liczbę stopni swobody członów i klasę paryjjięematycznej.
O "7
l\- Utrtb^ <nJ-o*o'*?
Narysować schemat kinematyczny grupy strukturalnej POP. Narysować schemat kinematyczny mechanizmu, który zawiera taką
grupę.


' /
__^ Określić liczbę stopni
tcu^y} ii; swobody członów i klasę pary kinematycznej.
Jaką parę kinematyczną nazywa się ''wyższą" ?
\cć O)
to
r*5'
Wyznaczyć liczbę członów tworzących parę kinematyczną o krotności k=3.
fca i 3 t=.v. ~<4 5V~ 3+-'
vt r: U
S-9p
S-11p
rysunktf rókcyir
Narysować płaski schemat kinematyczny mechanizmu danego na
konstrukcyjnym.
Narysować schemat kinematyczny mechanizmu zapisanego symbolem.

u o
M
Wyszukiwarka
Podobne podstrony:
23 luty 07 (22) 1.1.6.3. Przykłady obliczania ruchliwości mechanizmów płaskich Obliczenie ruchliwośc
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.6.3. Przykłady obliczania ruchliwości mechani
1044925f0336257313842U8918391 n Egzamin i przedmiotu teoria mechanizmów
DSC02947 2 Egzamin z przedmiotu teoria mechanizmów 1. Oblicz stopień ruchliwości m
65720 skanuj0010 (340) 4, Obliczenia i dobór długości śruby Oczkowej „ I ” dla danego skoku naciągu
skanuj0010 (378) Zestaw 42 1. Oblicz objętość czworościanu o wierzchołkach A(3,5,6
więcej podobnych podstron