76199 ip1
Protokół z ćwiczenia : Identyfikacja modeli parametrycznych da ta . 4d..A ^ T
Laboratorium Identyfikacji Procesów gmpa/sekcja....?J.=?..£r!..........................
|
lane Nazwisko ^ .—. , v . \L f-c? Cj_.jLz (Vłt tL- 'b 6 k- |
.............75 |
|
Imię Ma s ko |
.............75 |
Przebieg ćwiczenia
O.clJak można wykorzystać błąd predykcji do wyboru struktury modelu? (1.0 pkt) ,—
^ (A \*sv\ ,J_A oLf
Ł° tWn^j moJó^f b -
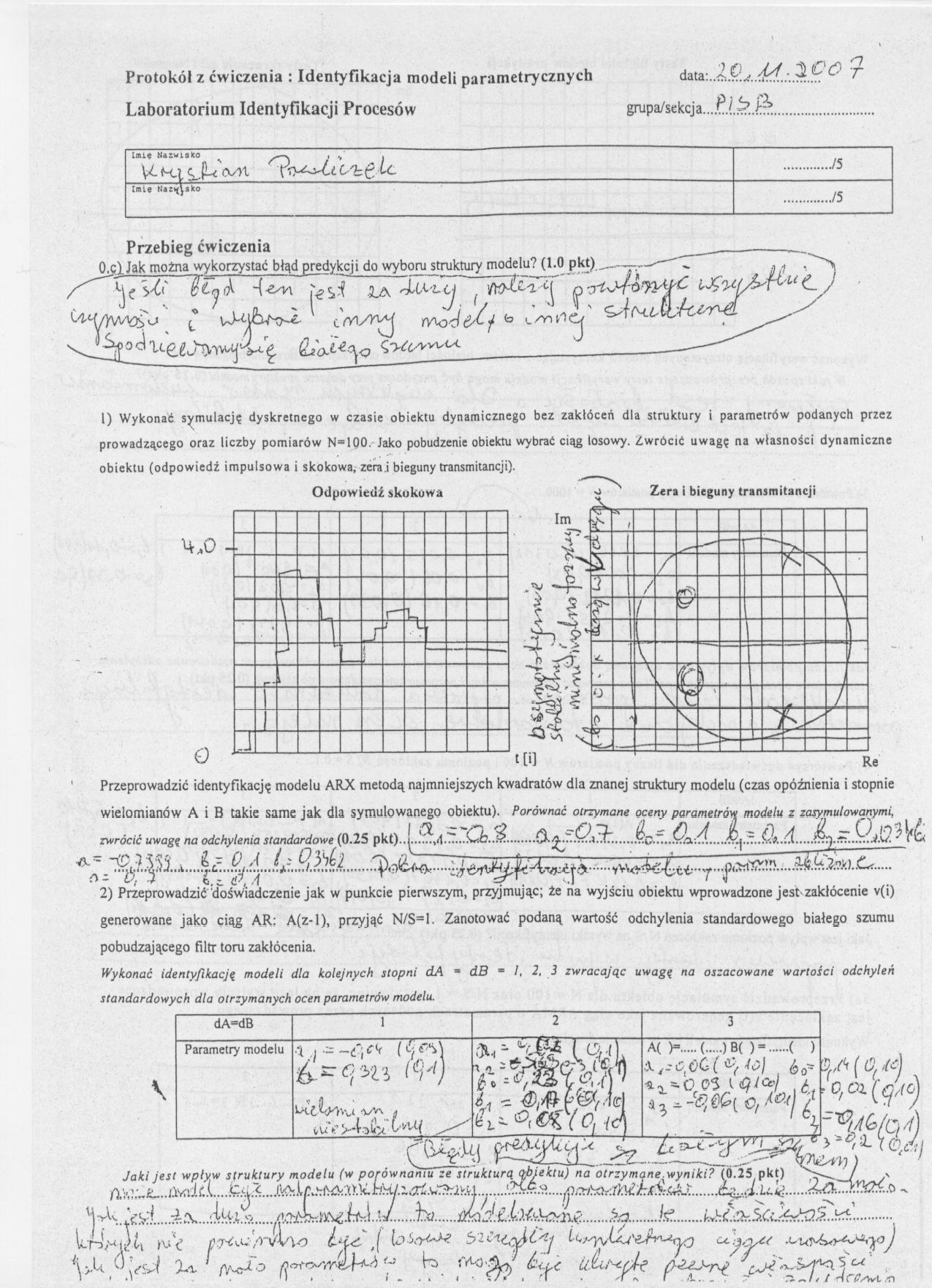
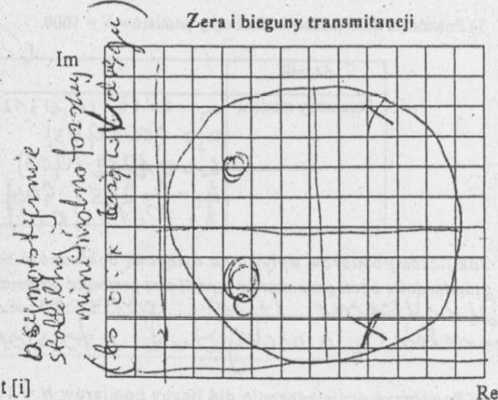
1) Wykonać symulację dyskretnego w czasie obiektu dynamicznego bez zakłóceń dla struktury i parametrów podanych przez prowadzącego oraz liczby pomiarów N=100. Jako pobudzenie obiektu wybrać ciąg losowy. Zwrócić uwagę na własności dynamiczne obiektu (odpowiedź impulsowa i skokowa, zera.i bieguny transmitancji).
Odpowiedź skokowa
u,o
|
r-t | |||||||||||
|
l | |||||||||||
|
1 |
r |
V, | |||||||||
|
L |
r |
i | |||||||||
|
- |
T | ||||||||||
|
r*1 | |||||||||||
o
' Przeprowadzić identyfikację modelu ARX metodą najmniejszych kwadratów dla znanej struktury modelu (czas opóźnienia i stopnie wielomianów A i B takie same jak dla symulowanego obiektu). Porównać Otrzymane oceny parametrów modelu z zasymulowanymi, zwrócić uwagę na odchylenia standardowe (0.25 pkt)..Cii?..s£..............^ę.~..triL.ul. ~ . ~..Q>..d. •' Vb<
......
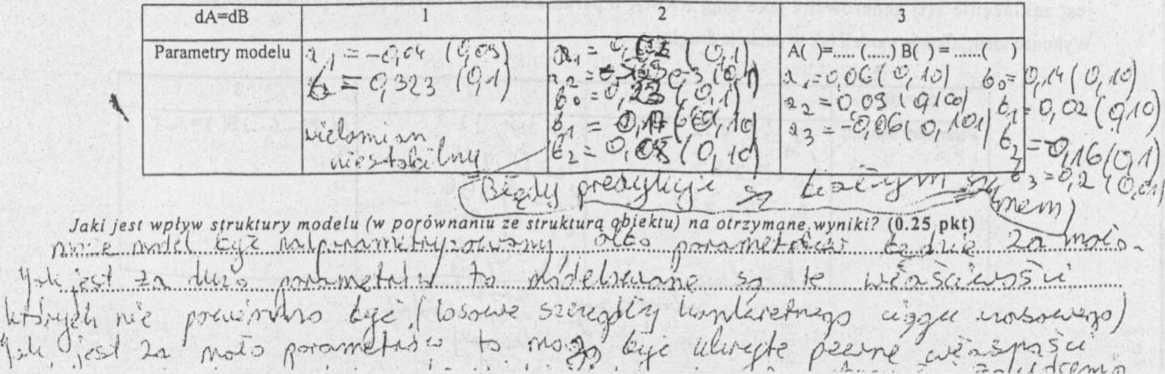
2) Przeprowadzić doświadczenie jak w punkcie pierwszym, przyjmując; że na wyjściu obiektu wprowadzone jest zakłócenie v(i) generowane jako ciąg AR: A(z-l), przyjąć N/S=l. Zanotować podaną wartość odchylenia standardowego białego szumu pobudzającego filtr toru zakłócenia.
Wykonać identyfikację modeli dla kolejnych stopni dA m dB m I. 2, 3 zwracając uwagę na oszacowane wartości odchyleń standardowych dla otrzymanych ocen parametrów modelu.
Wyszukiwarka
Podobne podstrony:
80651 ip3 Protokół z ćwiczenia : Identyfikacja modeli parametrycznych data- Labora
Zdjęcie0690 2 Ćwiczenie nr 2 Identyfikacja wybranych parametrów układu oddechowego
OBROBKASKRAWANIEM 5 Ćwiczenie nrDOBÓR NARZĘDZI I PARAMETRÓW SKRAWANIA DO
Ćwiczenie 5. Identyfikacja tworzyw sztucznych Identyfikacja tworzyw sztucznych Tworzywo sztuczne jes
Ćwiczenie 5. Identyfikacja tworzyw sztucznychrozkładu próbki. Odczyn par określa się przy pomocy
Ćwiczenie 5. Identyfikacja tworzyw
Ćwiczenie 5. Identyfikacja tworzyw sztucznych Identyfikacja tworzyw na podstawie
Ćwiczenie 5. Identyfikacja tworzyw sztucznych Spektroskopia w podczerwieni Materia może oddziaływać
Ćwiczenie 5. Identyfikacja tworzyw sztucznych Wykonanie ćwiczenia: 1. Dla 3 wzorco
13 Jakie jest przeznaczenie adresów logicznych w sieci działającej w oparciu o protokół IP? O Identy
9.7. Zasoby systemowe ĆWICZENIA 1. Identyfikacja i charakteryzowanie magistral
Wykonanie ćwiczeń: Ćwiczenie 1 Korzystając z modeli komórek elementarnych wolframu, diamentu, magnez
IMG 22 Tabele 1.6. Ogólne zasady metodyki ćwiczeń w okresie pooperacyjnym Parametr 1.-3. doba 3. d
więcej podobnych podstron