Image13 (20)


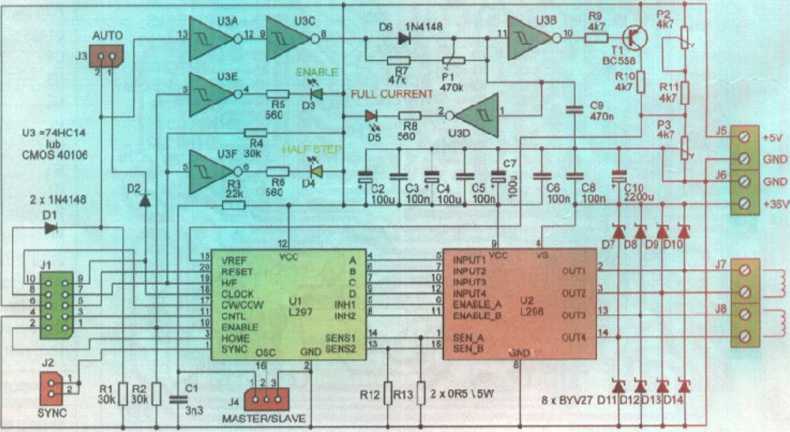
Rys. 1 Schemat ideowy
Na łamach EdW było prezentowanych co najmniej kilka konstrukcji sterowników silników krokowych, zarówno unipolarnych, jak i bipolarnych. Jednak były to konstrukcje mało rozbudowane, nadające się do stosunkowo prostych zastosowań. Schody zaczynają się, gdy chcemy wykorzystać takie „cudo” do bardziej zaawansowanych zastosowań niż pod-meś-opuść żaluzje. Wadami prostych sterowników są: ograniczone możliwości sterowania sprowadzające się do zakręcenia wałem silnika odwrotnie bądź zgodnie z ruchem wskazó wek zegara, niewykorzystywane w pełr.i możliwości podłączonego doń silnika krokowego, marnowanie energii elektrycznej na ogrzewanie wnętrza obudowy urządzenia, gdy silnik krokowy jest w bezruchu, a i sam silnik też robi się mocno gorący. Ampery zamieniają się na energię cieplną! Każdy mA zużywany bez celu ma znaczenie!
Poniżej opisano sterownik ekonomiczny, w którym zastosowano modulację szerokości impulsu do regulacji natężenia prądu płynącego przez stojan silnika (sterowanie siekane zwane inaczej czoperowaniem), z wyborem kierunku obrotów i trzech trybów pracy: jednofazowa,
dwufazowa, półkrokowa Sterownik ma ponadto możliwość napięciowego ustawienia prądu znamionowego silnika (do 2A) i prądu podtrzymania. Dodatkową zaletą układu jest to, że został wykonany tylko na trzech układach scalonych i garstce elementów dyskretnych. Moduł sterownika został zaprojektowany z myślą o wykorzystaniu go w większym urządzeniu i stanowi swego rodzaju interfejs między „mózgiem” urządzenia a silnikiem krokowym, nie jest więc autonomicznym urządzeniem i wymaga sygnałów sterujących. Zastosowanie dwóch specjalizowanych układów scalonych znacznie uprościło konstrukcję sterownika oraz zapewniło dość duże możliwości w sterowaniu bipolarnym silnikiem krokowym przy dobrym stosunku możliwości-cena.
Czytelników, którzy nie bardzo orientują się co to takiego silnik krokowy, odsyłam do znakomitego sześcioczęściowego artykułu „Silniki krokowe od podstaw” zamieszczonego w EdW 7-12/2002. Wyjaśniono tam bardzo przystępnie wszystko, co należy wiedzieć tych niezwykle użytecznych podzespołach elektromechanicznych i o sposobach ich sterowania.
Opis układu
Jak już wspomniałem, sterownik został zbudowany w oparciu o dwa specjalizowane układy scalone L297 i L298N (SGS-Thomp son). Schemat ideowy przedstawiony na rysunku 1 jest typową konfiguracją zalecaną przez producenta wr nocie aplikacyjnej z „małym bajerem” w postaci bloku sterowania prądem podtrzymania zrealizowanym na układzie U3 (40106 lub 7^14) i tranzystorze Tl. Napięcie +5V (VCC) doprowadzone jest przez złącze śrubowe J5 i jest dostępne na 6 pinie złącza Jl. Masa zasilania jest dostępna na pinie 4 złącza Jl. Sześć kondensatorów C2-C7 filtruje napięcie zasilające część cyfrową układu (VCC), a kondensatory C8 i CIO odpowiedzialne są za filtrację napięcia zasilającego silnik krokowy (VS).
r1

Maj 2006
Elektronika dla Wszystkich
Wyszukiwarka
Podobne podstrony:
38046 Image163 LEKTROMKA Rys. 1 Schemat ideowyDo czego to służy? Opisany poniżej wzmacniacz jest kol
Image185 (3) ★★★AVT Mmm Rys. 2 Schemat ideowy U2 ♦5V P0.1WMAT1.Z/MISO* PO
Image224 Rys. 1 Schemat ideowyDo czego to służy? Opisany poniżej projekt to światło stop sterowane z
Image103 (4) Eu LEKTRONIKABODO Rys 4. Schemat ideowy wzbudnicy SSB z filtrową metodą formowania sygn
14163 Image230 Rys. 1 Schemat ideowy Pomysł na zbudowanie tego urządzenia podsunął mi na jesieni 200
Image109 (3) Rys. 1 Schemat ideowy stroboskopu Prezentowany projekt to lampa sygnalizacyjna, która w
Image127 (2) ■ Projekty AVT Rys. 1 Schemat ideowy Wyjście 1 Wyjfccl* 2 Wyjtcła 1 Wyjścia 4 R 220R/10
więcej podobnych podstron