054 055
sta, otrzymując minimalną HPS funkcji. Fnazczególna Impliknnty wypisujemy natychmiast patrząc na daną grupę Jedynek, aą to bowiem Iloczyny zmian-, nych odpowiadających,zgodnie z (1.10) tym cyfrom w opisie tabeli, kt6re się nie zmieniają przy przebiegnięciu wszystkich Jedynek w obrębie grupy.
Przedstawione na rys. 2.8 przykłady ilustrują podaną metodę. W przykładzie b) nie uwzględniono pary Jedynek odpowiadającej zbędnemu lmplikan-towi prostemu ^2xy Istnieje też druga postać minimalna, dla której zbędnym Jest lmpllkant - porównaj z przykładem 2.2 (c.d.). W przykładzie
d) również istnieje druga postać minimalna wynikająca z zastąpienia składnika x^x2xił przez składnik x^x^x^. W przykładzie e) zwróćmy uwagę na czwórkę powstałą z Jedynek leżących'na rogach tablicy. V f) zaistniał interesujący przypadek eliminacji zbędnego implikantu *2XĄ ~ Por*wnaJ z przykładem 2.4.
Dotąd mówiliśmy tylko o metodzie tablic Kar naugha w zastosowaniu do uzyskiwania minimalnej postaci funkcji jako sumy impllkantów prostych. Wszystkie zasady tworzenia grup 2* jedynkowych oraz eliminacji zbędnych impllkantów obowiązują także dla implieentów z tym, żs wtedyt 1° tworzy się grupy zer, 2° odpowiadające utworzonym grupom implicenty wypisujemy Jako sumy zmiennych według przyporządkowania (1.14).
Ha rys. 2.9 przedstawiono kilka przykładów minimalizacji funkcji do BPI.
A)
b)
MMMM
|
Jfi | ||
|
GE! |
$ |
<0
MMMM
|
G |
J) |
ZL |
N |
F | ||||
|
T |
T |
M |
(■ |
0 | ||||
|
X |
G |
ii |
G |
$ | ||||
|
31 |
Ll |
10 |
D | |||||
Hx, ł*j ♦Xj)(xI»x*Mx, ♦ *k)
f * (vxIłX^lłYS'P|łV*J^tł*I‘*i)
• (*2«jłX0M|ł*sXyVxfołVx0
Rys. 2.9. Przykłady minimalizacji funkcji logicznych do postaci NPI. W przykładzie d) podano też postać minimalną wynikającą z innego wyboru grup
zer
W przypadku funkcji niepełnie określonych, w kratki tablicy Karnaugba odpowiadające składnikom nieokreślonym wpisuje się znak x. W procesie ml-
o
|
i) |
'3 M |
11 |
11 |
11 |
|
0 |
X | |||
|
1 | ||||
|
*3 | ||||
|
c) |
11 |
II |
n | |
|
N |
ń |
x' |
X | |
|
H |
X |
T | ||
|
11 |
X |
U |
X, | |
|
» |
X | |||
b)
*rt
*3xł
o«
01
«
w
00 M
|
f*i | |||
|
0 | |||
|
X |
0 |
X |
X |
|
X |
y |
X |
X |
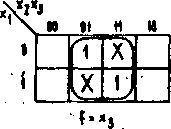
Rys. 2.10. Przykłady minimalizacji funkcji niepełnie określonych
nimalizacji kratkom tym przypisuje się wartość 1 lub O, tak aby minimalizacja była najbardziej efektywna. Przykłady minimalizacji funkcji niepełnie określonych przedstawione są na rys. 2.10.
. Reasumując, metoda tablic Karnaugha pozwalając na szybkie tworzenie i eliminacją impllkantów (implicentów) Jest wygodną i najczęściej stosowaną metodą minimalizacji dla funkcji o ilości zmiennych nie przekraczającej 5-Dla funkcji o większej ilości zmiennych coraz trudniejsze staje się wyszukiwanie impllkantów (implicentów) i eliminacja zbędnych. Wtedy pozostaje zastosowanie metody t>ilne'a‘Kc Cluskey'a. Kalety sobie Jednak zdawać sprawę, że ze wzrostem liczby zmiennych bardzo szybko rośnie rozmiar kolumn i ilość prób wykonywania operacji sklejania i nawet zastosowanie komputera dla minimalizacji tą metodą staje się problematyczne, gdy ilość zmiennych wynosi kilkadziesiąt (proponujemy czytelnikowi oszacowanie ilości prób sklejeń składników ZNPS w pierwszym etapie minimalizacji funkcji 100 zmiennych posiadającej w przybliżeniu połowę jedynek). W takim przypadku w grę wchodzą inne metody, dające rozwiązanie szybciej, ale nie gwarantujące pełnej minimalizacji.
2.2. SYNTEZA UKZADÓW KOMBINACYJNYCH
Zadanie syntezy strukturalnej układów kombinacyjnych można sformułować następująco: Zadane Je3t działanie układu kombinacyjnego (w postaci tablicy lub funkcji logicznej) oraz zespół funktorów logicznych stanowiących system funkcjonalnie pełny. Należy tak połączyć- funktory, aby otrzymać układ o zadanym działaniu.
Wyszukiwarka
Podobne podstrony:
054 055 54 sta, otrzymując minimalną NFS funkcji. Poszczególna impllkanty wypisujemy natychmiast pat
str 054 055 (2) 27 ,JAKO STRZELBA NASTAŁA...1 Wypieranie broni białej przez palną było procesem dość
054 055 2
13377 str 054 055 (3) 34. DAWNE OBYCZAJE obchodzone były: 1. podkoziołek 6. popieleć 2.
Minimalizacja konfliktów funkcjonalno- przestrzennych • Prowadzenie polityki
Scan0007 (18) EN ISO 9001:2008 c) otrzymywania wyników dotyczących funkcjonowania
054 055 2 54 Programowanie liniowe dwa alternatywne bazowe rozwiązania optymalne: W, i W, oraz alter
054 055 - Powtórne kliknięcie wcześniej zaznaczonego pola spowoduje usunięcie zaznaczenia. Na rysunk
054 055 RotdjlllV od zadań i warunków działania. Organy Jednoosobowe są z reguły bardziej operatywne
więcej podobnych podstron