11612 P1080326
9. Układy sensoryczne
trajektorii ruchu. Jest to klucz do realizacji powtarzalnych oraz bezpiecznych operacji nie tylko w zakresie manipulowania przedmiotami, lecz także w ramach zrobotyzowanych stanowisk, np. szlifowania, polerowania, gratowania.
9.6. Układy sensoryczne w robotach mobilnych
9.6.1. Czujniki ultradźwiękowe
Czujniki ultradźwiękowe są przeznaczone do wielozadaniowych celów wymagających również dużej odporności. Układy sensoryczne tego typu znajdują zastosowanie wszędzie tam, gdzie jest wymagane dostarczenie informacji określających obecność lub bezwzględną pozycję obiektu. Dotyczy to zarówno przedmiotu ruchomego, jak i będącego w spoczynku. Są one powszechnie stosowane ze względu na wytrzymałość i wielozadaniowość. Bardzo często stanowią jedyną alternatywę dla prawidłowego przeprowadzenia detekcji materiałów o lśniącej powierzchni oraz przezroczystych obiektów manipulacji. Również czynniki otoczenia zewnętrznego, w którym pracuje czujnik, w postaci dużej wilgotności lub zapylenia nie mają wpływu na dokładność dokonywanych przez nie pomiarów, i
Za pomocą odbitego sygnału ultradźwiękowego możliwe jest wykrywanie przedmiotów oraz pomiar odległości, a także określenie kierunku przemieszczenia się przedmiotu i jego prędkości na podstawie dopplerowskiego przesunięcia częstotliwości. Najmniejsze wymiary obiektu wykrywanego za pomocą czujnika ultradźwiękowego wynoszą 3x3x40 mm, przy maksymalnym zasięgu działania do 3 m. Istnieją również modele czujników o zasięgu do 10 m. Dość mała rozdzielczość czujników ultradźwiękowych jest związana ze stosunkowo dużą długością fal ultradźwiękowych.
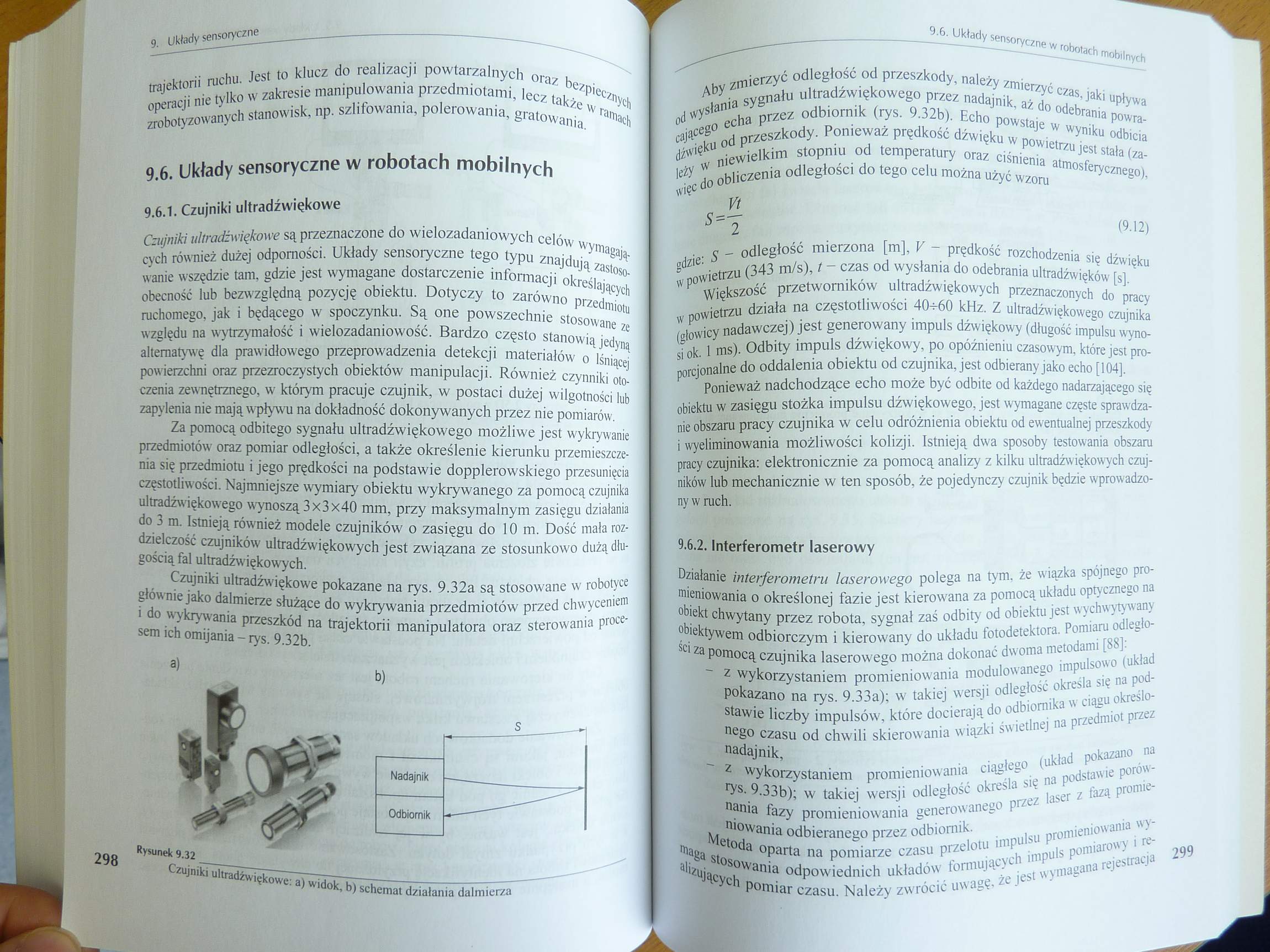
Czujniki ultradźwiękowe pokazane na rys. 9.32a są stosowane w robotyce głównie jako dalmierze służące do wykrywania przedmiotów przed chwyceniem i do wykrywania przeszkód na trajektorii manipulatora oraz sterowania procesem ich omijania-rys. 9.32b.
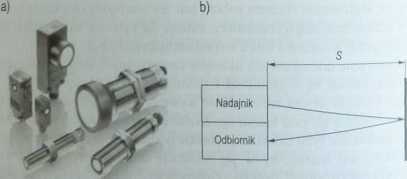
Czujniki ultradźwiękowe: a) widok, b) schemat działania dalmierza
Rysunek 9.32
Aby zmierzyć odległość od przeszkody, należy zmierzyć czas, jaki upływa od wysłania sygnału ultradźwiękowego przez nadajnik, aż do odebrania powracającego echa przez odbiornik (rys. 9.32b). Echo powstaje w wyniku odbicia dźwięku od przeszkody. Ponieważ prędkość dźwięku w powietrzu jest stała (zależy w niewielkim stopniu od temperatury oraz ciśnienia atmosferycznego), więc do obliczenia odległości do tego celu można użyć wzoru
S
u
2
(9.12)
gdzie: S fc. odległość mierzona [m], V — prędkość rozchodzenia się dźwięku w powietrzu (343 m/s), t — czas od wysłania do odebrania ultradźwięków [s]. Większość przetworników ultradźwiękowych przeznaczonych do pracy w powietrzu działa na częstotliwości 40-5-60 kHz. Z ultradźwiękowego czujnika (głowicy nadawczej) jest generowany impuls dźwiękowy (długość impulsu wynosi ok. I ms). Odbity impuls dźwiękowy, po opóźnieniu czasowym, które jest proporcjonalne do oddalenia obiektu od czujnika, jest odbierany jako echo [104].
Ponieważ nadchodzące echo może być odbite od każdego nadarzającego się obiektu w zasięgu stożka impulsu dźwiękowego, jest wymagane częste sprawdzanie obszaru pracy czujnika w celu odróżnienia obiektu od ewentualnej przeszkody i wyeliminowania możliwości kolizji. Istnieją dwa sposoby testowania obszaru pracy czujnika: elektronicznie za pomocą analizy z kilku ultradźwiękowych czujników lub mechanicznie w ten sposób, że pojedynczy czujnik będzie wprowadzony w ruch.
9.6.2. Interferometr laserowy
Działanie interferometru laserowego polega na tym, że wiązka spójnego promieniowania o określonej fazie jest kierowana za pomocą układu optycznego na obiekt chwytany przez robota, sygnał zaś odbity od obiektu jest wychwytywany obiektywem odbiorczym i kierowany do układu fotodetektora. Pomiaru odległości za pomocą czujnika laserowego można dokonać dwoma metodami [88]:
—■ z wykorzystaniem promieniowania modulowanego impulsowo (układ pokazano na rys. 9.33a); w takiej wersji odległość określa się na podstawie liczby impulsów, które docierają do odbiornika w ciągu określonego czasu od chwili skierowania wiązki świetlnej na przedmiot przez nadajnik,
- z wykorzystaniem promieniowania ciągłego (układ pokazano na rys. 9.33b); w takiej wersji odległość określa się na podstawie porównania fazy promieniowania generowanego przez laser z fazą promieniowania odbieranego przez odbiornik.
Metoda oparta na pomiarze czasu przelotu impulsu promieniowania wy-stosowania odpowiednich układów formujących impuls pomiarowy i refujących pomiar czasu. Należy zwrócić uwagę, że jest wymagana rejestracja
299
Wyszukiwarka
Podobne podstrony:
67726 P1080325 9. Układy sensoryczne ruchu ramienia robota przy różnych jego ustawieniach. Kalibracj
26586 P1080314 9. Układy sensoryczne 9.2.2. Selsyn przelicznikowy (rezolwer) Selsyn jest małą wirnik
P1080319 9. Układy sensoryczne 9.4.2. Przetworniki siły i naprężeń Wyposażenie chwytaka w przetworni
P1080324 9. Układy sensoryczne - odległości między charakterystycznymi punktami ob
IMG 70 (4) £ UKŁADY rOLĄCZtŃ STACJI we. Jest to rozwiązanie charakteryzujące się dużą niezawodnością
więcej podobnych podstron