19097 P1030199
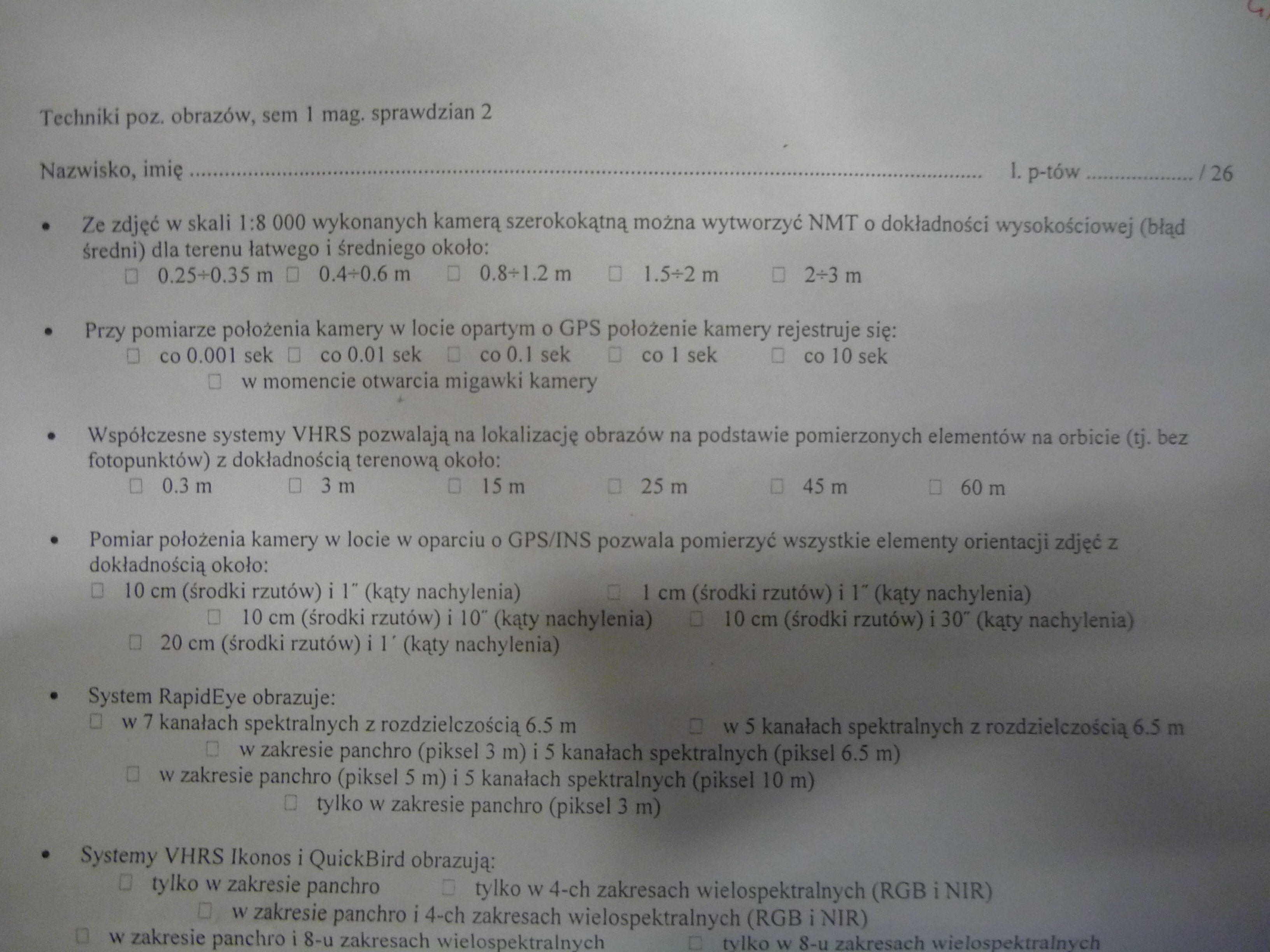
Techniki poz. obrazów, sem 1 mag. sprawdzian 2 Nazwisko, imię......................................................
I. p-tów
/ 26
• Ze zdjęć w skali 1:8 000 wykonanych kamerą szerokokątną można wytworzyć NMT o dokładności wysokościowej (błąd średni) dla terenu łatwego i średniego około:
O 0.25+0.35 m □ 0.4+0.6 m O 0.8+1.2 m D 1.5+2 m D 2+3 m
• Przy pomiarze położenia kamery w locie opartym o GPS położenie kamery rejestruje się:
□ co 0.001 sek D co 0.01 sek □ co 0.1 sek □ co 1 sek O co lOsek
O w momencie otwarcia migawki kamery
• Współczesne systemy VHRS pozwalają na lokalizację obrazów na podstawie pomierzonych elementów na orbicie (tj. bez fotopunktów) z dokładnością terenową około:
D 0.3 m O 3 m D 15 m O 25 m O 45 m O 60 m
• Pomiar położenia kamery w locie w oparciu o GPS/łNS pozwala pomierzyć wszystkie elementy orientacji zdjęć z dokładnością około:
□ 10 cm (środki rzutów) i 1" (kąty nachylenia) ,,.....1 cm (środki rzutów) i 1" (kąty nachylenia)
□ 10 cm (środki rzutów) i 10" (kąty nachylenia) Q 10 cm (środki rzutów) i 30" (kąty nachylenia)
O 20 cm (środki rzutów) i 1' (kąty nachylenia) 1
• System RapidEye obrazuje:
3 w 7 kanałach spektralnych z rozdzielczością 6.5 m i .K Q w 5 kanałach spektralnych z rozdzielczością 6.5 m 3 w zakresie panchro (piksel 3 m) i 5 kanałach spektralnych (piksel 6.5 m)
□ w zakresie panchro (piksel 5 m) i 5 kanałach spektralnych (piksel 10 m)
□ tylko w zakresie panchro (piksel 3 m)
• Systemy VHRS Ikonos i QuickBird obrazują:
O tylko w zakresie panchro D tylko w 4-ch zakresach wielospektralnych (RGB i N1R)
O w zakresie panchro i 4-ch zakresach wielospektralnych (RGB i NiR)
Q w zakresie panchro i 8-u zakresach wielospektralnych □
Wyszukiwarka
Podobne podstrony:
DSC01729 Techniki poz. obrazów, sem 1 mag. sprawdzian 1 Nazwisko,
OD A do Z zob. poz. 406 PRACODAWCA, rynek, pracownik zob. poz. 409 SPRZEDAWAJ więcej - sprawdzone te
Spis treści1. Techniki rejestracji obrazów1.1. Fotografia 1.1.1.
1. Techniki rejestracji obrazów Zgodnie z definicją przyjętą w 1998 roku, fotogrametria i teledetekc
Rozmowy a nie inny ruch. Dzięki temu, że film daje szansę, aby pewne techniki przedstawić obrazowo,
P8 Zastosowania technik fizjoterapeutycznych w kompleksowej terapii dzieci - sprawdzian praktyczny_
0000001(1) 2 Fizyka Techniczna * Rok: IV Sem: VII Prowadzący ćwiczenie: dr Mirosława Królikowska Da
0000002(1) 2 M §
0000003 2 Fizyka Techniczna Rok: IV Sem: VII Prowadzący ćwiczenie: dr Mirosława Królikowska Data wy
Zjazd VIII sem. Technikum dla Dorosłych - technik rolnik II sem. Szkoła Policealna -
Zagadnienia 1 RYSUNEK TECHNICZNY - PROJEKTStudia dzienne SEM. II1. PISMO TECHNICZNE Alfabet grecki p
20 SZCZEGÓŁOWE SPECYFIKACJE TECHNICZNE M13.00.00. Beton 6.2.2. Sprawdzenie
więcej podobnych podstron