32948 P1080338

10. Sztuczna inteligenci3 wrotom
Stopień

(unormowana)
Stopień
przynależności
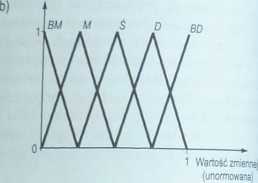
Rysunek 10.10 ___=______
Trójkątna funkcja przynależności dla: a) trzech podzbiorów, b) pięciu podzbiorów
Ilustracją powyższych rozważań jest nieskomplikowany przykład wnick: skowania rozmytego dla dwóch zmiennych i funkcji przynależności z trzema podzbiorami pokazany na rys. 10.11. Proces wnioskowania polega w pierwszym etapie na poszukiwaniu minimum wartości dla każdej przyjętej reguły, tzn. wyborze najmniejszej wartości spośród zbiorów wejściowych objętych analizowaną regułą. Blokiem wynikowym jest zbiór rozmyty Y, mający miano określonej wielkości fizycznej.
Reguła 1
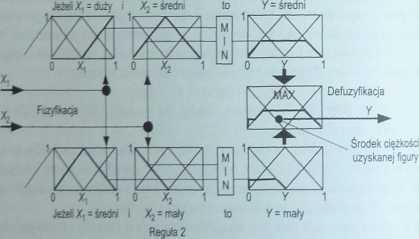
Przykład procesu wnioskowania rozmytego dla dwóch zmiennych i funkcji przynależno#11 z trzema podzbiorami
Pokazany model jest modelem wnioskowania typu Mamdaniego, opartjffl na bazie reguł i stosowaniu operatorów lingwistycznych. Jest to podejście naj' bardziej naturalne z punktu widzenia logiki rozmytej i tym samym szeroko sto* 322 sowane. Wnioskowanie takie jest wykorzystywane głównie w układach reg^n
cji, gdzie reguły dają wyrażenia lingwistyczne strategii sterowania oparte na znajomości eksperckiej systemu i zdrowym rozsądku.
Proces wnioskowania polega w pierwszym etapie na poszukiwaniu minimum wartości dla każdej przyjętej reguły, tzn. wyborze najmniejszej wartości spośród zbiorów wejściowych objętych analizowaną regułą. Blokiem wynikowym jest zbiór rozmyty 7, mający miano określonej wielkości fizycznej. W bloku defu-zyfikacja następuje końcowe wnioskowanie oparte na każdej z zasad podstawowych w ten sposób, że końcową wartością jest maksimum spośród podstawowych zbiorów rozmytych. Ustalenie maksimum umożliwia uwzględnienie wszystkich zasad (reguł) podstawowych. Taki proces wnioskowania nosi nazwę zasady mJmaks. i jest podobny do sposobu myślenia człowieka.
10.4.3. Przykład sterowania według reguł rozmytych
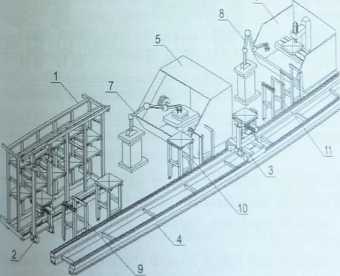
Jako przykład obiektu sterowanego wg reguł rozmytych posłużył miniaturowy elastyczny system wytwarzania (MESW) - rys. 10.12. System jest miniaturą izeczywistych zrobotyzowanych systemów obróbkowych stosowanych w przemyśle o strukturze funkcjonalnej, takiej jak systemy przemysłowe. Zawiera obrabiarki' urządzenia magazynowe, transportowe i roboty stosowane i powiązane a sobą jak ]W. rzeczywistych systemach przemysłowych. System odzwierciedla zachodzące w rzeczywistości różne procesy obróbki i przepływ przedmiotów oraz umożliwia przeprowadzanie doświadczalnych weryfikacji różnych metod planowania, harmonogramowania i sterowania produkcji, również z obszaru sztucznej inteligencji [114].
6
^ 10.12

2 - układarka regałowa, 3 - szynowy wózek transportowy. 4 - tor jezdny. 5 - to-Ml, 6 - frezarka M2, 7 — robot tokarki, 8 - robot frezarki. 9 - stanowiska odkładcze ukladarid regałowej, 70 r-stanowiska odkładcze tokarki, 11 - stanowiska odkładcze frezarki 323
Wyszukiwarka
Podobne podstrony:
P1080334 10. Sztuczna inteligencja w robotyce Zmodyfikowana waga 00.2) W procesie samouczenia, opisa
74879 P1080341 10. Sztuczna inteligencja w robotyce 10. Sztuczna inteligencja w robotyce Nowe wagi k
więcej podobnych podstron