38082 Image25
48
1.14
a. Przyspieszenie punktu poruszającego się po okręgu wyraża się za pomocą współrzędnych biegunowych przez wektor
r(p2 tr + rę t
a = ar ir + dy iv =
gdzie ir i i są wektorami jednostkowymi tego układu
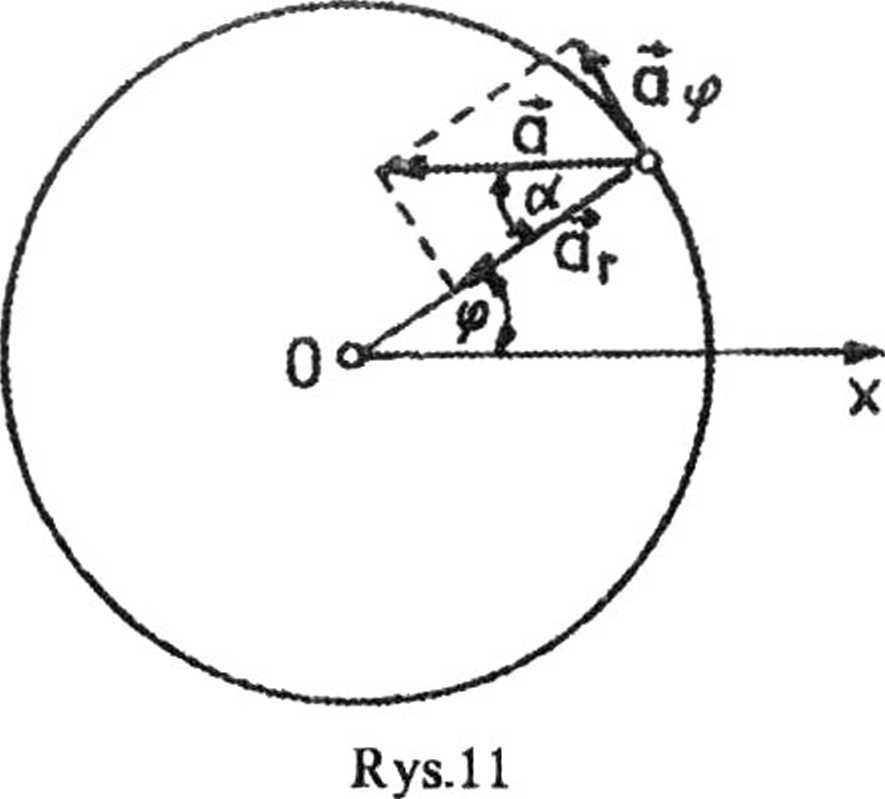
Z rys. 11 widać, że
a
<p _
a.
= tga.
Podstawiając do tego wzoru odpowiednie
wartości na a9 i ar otrzymujemy
= tga,
co można też zapisać w postaci
Po rozdzieleniu zmiennych i scałkowaniu mamy

1 + t (d0 tga'
Całkując ponownie znajdujemy szukany kąt
<P
ctga ln | (1 + t qj0 tga)|.
Gdy a n
“ = 2* 9 b.
= 0, prędkość kątowa ę = const, czyli ruch jest jednostajny. Gdy = 0, więc nie ma ruchu.
r co
v = r (p
t
gdzie tj = 1 + t co0 tga.
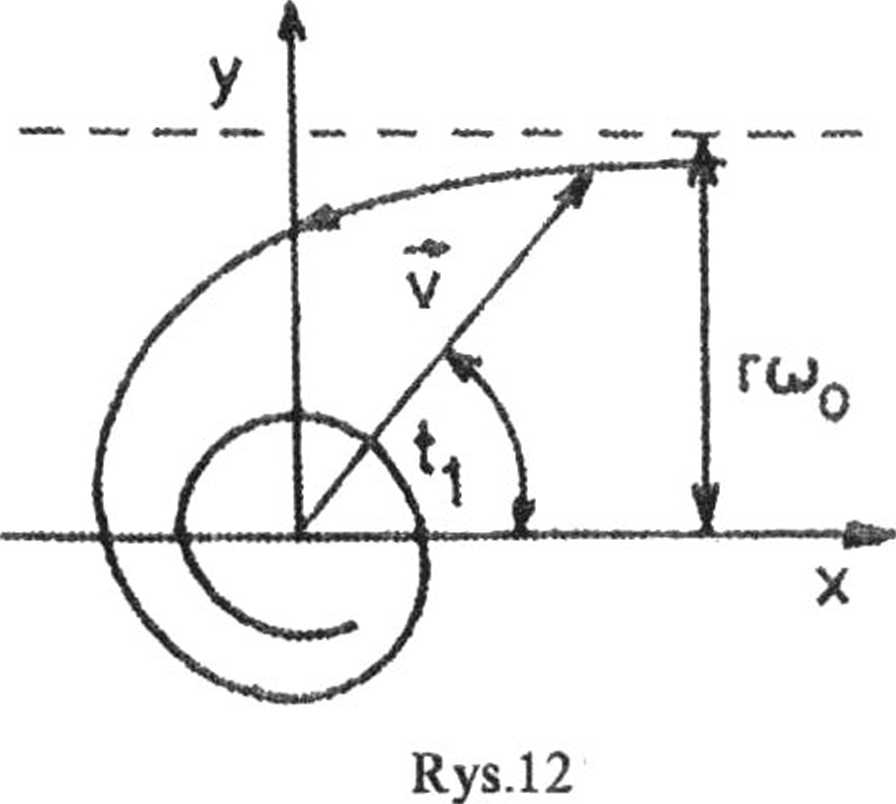
Zaznaczone na rys. 12 współrzędne prostokątne x, y związane są z współrzędnymi biegunowymi v, ti równaniami: x = v costl> y = v sintA.

L i

Wzór przedstawiający równanie hodografu jest równaniem spirali hiperbolicznej. Jej asymptota znajduje się w odległości y — rco0 od osi x (rys. 12), gdyż
lim y = lim v sintl
sin ti
lim r m-
t, —* o
t j -*o
ti-* o
t
= r(00.
.15. Różniczkując dane równanie dwukrotnie względem czasu otrzymujemy
• •
2 axx + bx = 1,
Stały punkt ma więc współrzędną b

2a


2ax + b*
więc
1
4a2x\ ’
Wyszukiwarka
Podobne podstrony:
Image25 48 1.14 a. Przyspieszenie punktu poruszającego się po okręgu wyraża się za pomocą współrzędn
Image25 (26) 48 1.14 a. Przyspieszenie punktu poruszającego się po okręgu wyraża się za pomocą współ
Image25 (26) 48 1.14 a. Przyspieszenie punktu poruszającego się po okręgu wyraża się za pomocą współ
Image25 (26) 48 1.14 a. Przyspieszenie punktu poruszającego się po okręgu wyraża się za pomocą współ
formy wiciowe formy poruszające się za pomocą rzęsek formy pozbawione organeli ruchu sporozoity
Zoologia1 TYP: SARKODOWE — SARCODINA Sarkodowe poruszają się za pomocą nibynóżek. Ciało ich otacza p
slajd 6 DRUGA ZASADA DYNAMIKI druza zasada dynamiki: Przyspieszenie z jakim porusza się ciało pod wp
Zdjecia 0004 Grupa 111 Liniowe prz>-spicszcnie chwilowe punktu poruszającego się jest skierowane
mech2 51 A OO l j n ciDtu AB jest równy f. Earoi&rz od punktu A do punktu B porusza się czasie t
mech2 51 A OO l j n ciDtu AB jest równy f. Earoi&rz od punktu A do punktu B porusza się czasie t
DYNAMIKA0018 RÓWNIA POCHYLA / wyp — ni Q, gdzie ~a jest przyspieszeniem, z jakim porusza się masa m
P1020072 (3) Opis pola prędkości ciała w ruchu pfasMm u(t) - wektor wodzący wybranego punktu ^porusz
więcej podobnych podstron